How to obtain Microstepping
-
Hi Everyone
Is there any detailed guideline explaining how to obtain the motor parameters that are requested in duet config tool;
Here is the stepper motors I use(Nema17);
https://www.amazon.ca/gp/product/B07MDY5RX7/ref=ppx_yo_dt_b_asin_title_o05_s00?ie=UTF8&psc=1 -
@muhac80 well the only ones any one could advise on are the motor currents, which should be set at ~80% of maximum, which in your case is 1200ma.
The rest is all printer specific
Owns various duet boards and is the main wiki maintainer for the Teamgloomy LPC/STM32 port of RRF. Assume I'm running whatever the latest beta/stable build is
-
@muhac80 for microstepping it's normally best to leave it set to x16 with interpolation on. Exception: if your extruder is ungeared, it will have a low steps per mm (usually less than 100), and you may get better print quality if you use x64 microstepping on the extruder motor.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
@jay_s_uk Thank you for the reply. My printer is not one of the known or over-the-counter printers that I can copy the parameters from. It is a custom made cartesian printer that is why I am little bit lost obtaining these parameters. Do you need any specific information about the printer to generate these motor values. Please advise.
-
@dc42 said in How to obtain Microstepping:
interpolation
Thank you for the reply; I looked at the description of the extruder again. It is indicating that it has internal gear ratio of 3:1 if this is what you are reffering;
SIMAX3D Dual Drive BMG Bowden Extruder utilizes an internal gearing ratio of 3:1 together with precision
cnc-machined hardened steel drive gears to give you a compact powerhouse for all your applications.https://www.amazon.ca/gp/product/B085BLQSYV/ref=ppx_yo_dt_b_asin_title_o08_s00?ie=UTF8&th=1
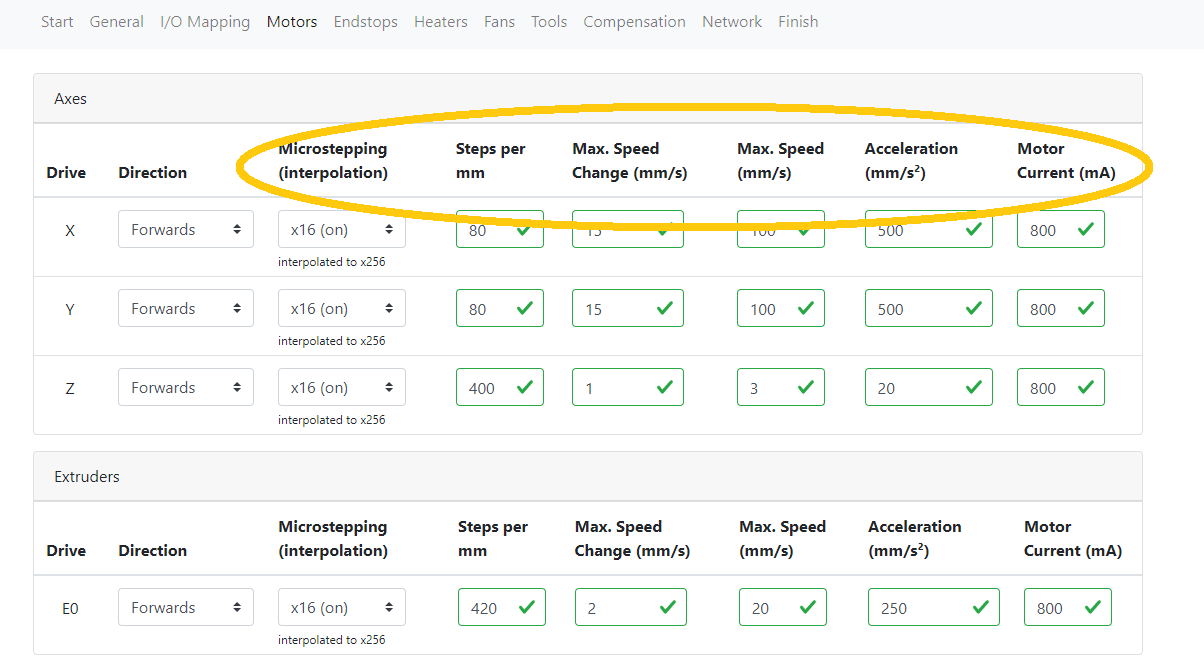
Would it make sense to leave all the values as it appears in the pic I sent, up in my first message, and then tune it later based on its performance (other than the current value obviously). Please advise.
-
What are you currently using as a control board?
Do you have a working config that you can extract info from? -
@paulhew Duet 2 wifi is my board and I don't have any current config. Building this printer from scratch. Thank you.
-
@muhac80 said in How to obtain Microstepping:
@dc42 said in How to obtain Microstepping:
interpolation
Thank you for the reply; I looked at the description of the extruder again. It is indicating that it has internal gear ratio of 3:1 if this is what you are reffering;
SIMAX3D Dual Drive BMG Bowden Extruder utilizes an internal gearing ratio of 3:1 together with precision
cnc-machined hardened steel drive gears to give you a compact powerhouse for all your applications.https://www.amazon.ca/gp/product/B085BLQSYV/ref=ppx_yo_dt_b_asin_title_o08_s00?ie=UTF8&th=1
Would it make sense to leave all the values as it appears in the pic I sent, up in my first message, and then tune it later based on its performance (other than the current value obviously). Please advise.
The steps per mm and 16X micro-stepping will be fine for a BMG style extruder and a normal (non-mixing) hot end. The speeds and accelerations look very low for all axes but you haven't provided any details about the moving mass or the motors which are driving it so it's impossible to advise. For the extruder, I use 3600 mm/min jerk (60 mm/sec), 9000 maximum speed (150mm/sec) and 6000 mm/sec^2 acceleration. Suggest you use something similar because the values you've chosen will slow the print down.
Be aware that the term "steps per mm" is always a misnomer and should really be "micro-steps per mm". So if you elected to use (say) 32x micro stepping for the extruder, then the steps per mm would need to change from 420 to 840.
-
@deckingman said in How to obtain Microstepping:
Be aware that the term "steps per mm" is always a misnomer and should really be "micro-steps per mm". So if you elected to use (say) 32x micro stepping for the extruder, then the steps per mm would need to change from 420 to 840.
Perhaps step-pulses-per-mm would be most accurate of all?
-
@phaedrux said in How to obtain Microstepping:
Perhaps step-pulses-per-mm would be most accurate of all?
Maybe. But then some pedant or other will likely point out driver chip interpolation will further sub divide the micro step pulses into smaller pulses so maybe we have to say "pre-interpolated-step-pulses-per-mm"
")
But that becomes difficult to remember. What we need is a mnemonic. How about Pre Interpolated Step Setting - Originating From Firmware.
-
@deckingman said in How to obtain Microstepping:
BMG style extruder
Thank you for the detailed explanation;
Here is some of the details x,y,z: 200,130,150mm
Motors: Nema 17; https://www.amazon.ca/gp/product/B07MDY5RX7/ref=ppx_yo_dt_b_asin_title_o05_s00?ie=UTF8&psc=1
Board: Duet 2 Wifi
Power Supply: 600W, 24 V: https://www.amazon.ca/gp/product/B00DEDB2U2/ref=ppx_yo_dt_b_asin_title_o08_s01?ie=UTF8&psc=1
Heatedbed:
https://www.amazon.ca/gp/product/B07MR59G18/ref=ppx_yo_dt_b_asin_title_o00_s00?ie=UTF8&psc=1Pleas let me know if you need any other details.
-
This post is deleted!