Like Z Banding
-
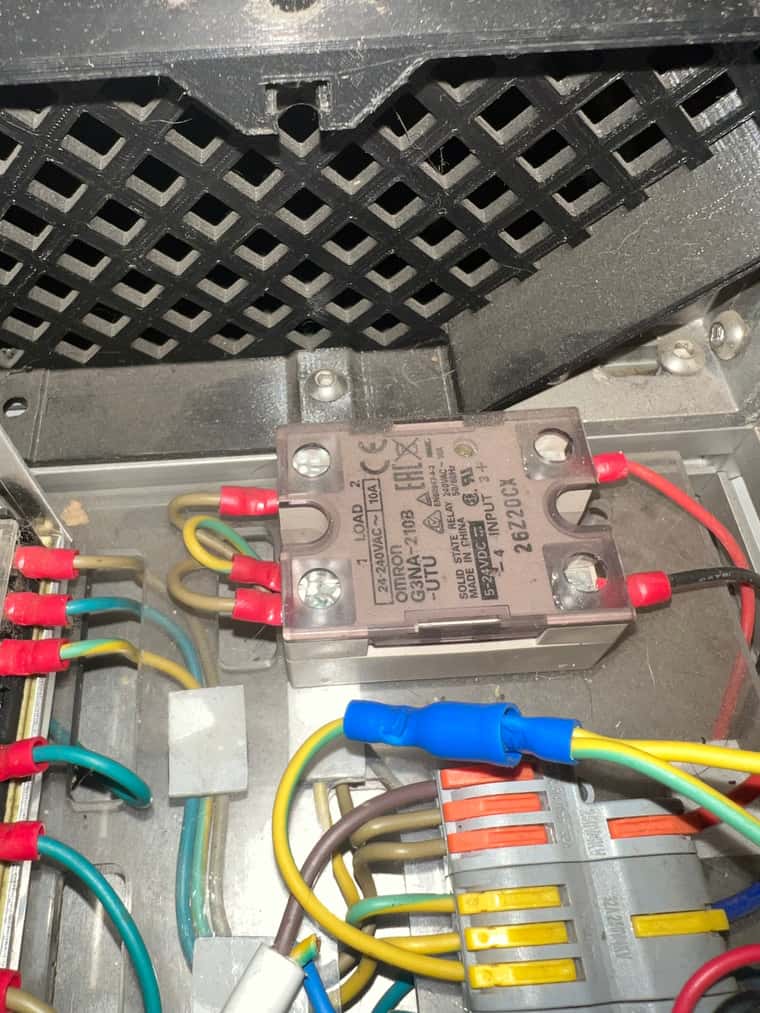
@Notepad Thank you for posting back to me, I am not fully clued up with electronics, but my understanding is from what your saying is that the heater seems ok, but it could be the relay starting to fail causing the control fluctuation.
I am not sure what you mean by fails deadly, I take it you mean open circuit? I am glad to say when I built the machine, I grounded both the metal bed plate and the relay down to the plug’s earth pin and not just the frame. I know not to take risks with the mains.
The pic shows the relay I am using to clarify, and if that is the case I will replace it before switching the printer on again.
-
@Ce72 Can you post your config.g?
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
@droftarts I know theres a better way of doing this but I'm not sure how
; Configuration file for Duet 3 (firmware version 3) ; executed by the firmware on start-up ; ; reconfigured HevORT V1 file for V2.8 on Sat Sep 14 2024 ; ; Port Layout ; Mainboard Ext board ; 0.0 Extruder 1.0 Front Left ; 0.1 Y Back Left 1.1 Rear Middle ; 0.2 Y Front Right 1.2 Front Right ; 0.3 X Back Right ; 0.4 X Front Left ; ; General preferences G4 S2 ; wait for expansion boards to start G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"HevORT" ; set printer name M669 K1 ; select CoreXY mode ; ; Network ;M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP ;M586 P0 S1 ; enable HTTP ;M586 P1 S0 ; disable FTP ;M586 P2 S0 ; disable Telnet ; ; Drives M569 P0.0 S1 ; physical drive 0.0 goes forwards Extruder M569 P0.1 S1 ; physical drive 0.1 goes forwards Y1 stepper M569 P0.2 S1 ; physical drive 0.2 goes forwards Y2 stepper M569 P0.3 S1 ; physical drive 0.3 goes forwards X1 stepper M569 P0.4 S1 ; physical drive 0.4 goes forwards X2 stepper M569 P1.0 S1 ; physical drive 1.0 goes forwards Z1 stepper on extension board M569 P1.1 S1 ; physical drive 1.1 goes forwards Z2 stepper on extension board M569 P1.2 S1 ; physical drive 1.2 goes forwards Z3 stepper on extension board M584 E0.0 X0.3:0.4 Y0.1:0.2 Z1.0:1.1:1.2 ; set drive mapping M906 X2096. Y2096. Z1179. E995.6 I30 ; set motor currents (mA) and motor idle factor in percent M917 X70 Y70 Z80 E70 ; Set motor standstill current reduction ;M970 X0 Y0 Z0 E0 ; Enable/disable phase stepping ;M970.1 X1000.0 Y2000.0 Z1000.0 E1000.0 ; Configure phase stepping velocity constant ;M970.2 X50000.0 Y50000.0 Z50000.0 E50000.0 ; Configure phase stepping acceleration constant M84 S30 ; set idle timeout M671 X-28.0:168.35:364.7 Y40.0:348.8:20.0 S10. ; Z leadscrew positions M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X80.1 Y80.1 Z800.00 E394.00 ; set steps per mm M203 X30000.00 Y30000.00 Z250.00 E1200.00 ; set maximum speeds (mm/min) M201 X20000.0 Y20000.0 Z50.00 E500.00 ; set accelerations (mm/s^2) M204 P10000. T10000. ; Max Acceleration M566 X900. Y900. Z60. E120. ; set maximum instantaneous speed changes (mm/min) M205 X15. Y15. Z1. E2. ; set working instantaneous speed changes (mm/sec) M572 D0 S0.080 ; Preasure advance ; ; Axis Limits M208 X0 Y0 Z0 S1 ; set axis minimium M208 X285.0 Y295.0 Z340 S0 ; set axis maximium ; ; Endstops M574 X1 S1 P"!io0.in" ; configure active-high endstop for low end on X via pin !io0.in M574 Y1 S1 P"io1.in" ; configure active-high endstop for low end on Y via pin !io1.in ; ; Z-Probes ; Probe 1 BL Touch M950 S0 C"io7.out" ; create servo pin 0 for BLTouch M558 K0 P9 C"^io7.in" H10 F300:120 T6000 ; set Z probe type to bltouch and the dive height + speeds ;M558 H30 ;*** Remove this line after delta calibration has been done and new delta parameters have been saved G31 P500 X0. Y-35.09 Z1.65 ; set Z probe trigger value, offset and trigger height ; Probe 2 Scanning Z probe M558 K1 P11 C"120.i2c.ldc1612" F36000 T36000 ; configure SZP as probe 1, type 11, on CAN address 120 G31 K1 Z2.15 Y27. ; define probe 1 offsets and trigger height M558.2 K1 S16 R134773 ; set drive current and reading offset M308 A"SZP coil" S10 Y"thermistor" P"120.temp0" ; thermistor on coil M955 P120.0 I56 ; Add accelerometer on SZP with CAN address 120 and specify orientation M557 X10.0:275.0 Y35.0:285.0 S10 ; define mesh grid ; ; Heaters & Sensors M308 S0 P"temp0" Y"thermistor" T100000 B3950 ; configure sensor 0 as thermistor on pin temp0 BED TEMP M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0 M307 H0 R0.859 K0.301:0.000 D4.90 E1.35 S1.00 B0 ; BED HEATER PID SETTINGS M140 H0 ; map heated bed to heater 0 M143 H0 S135 ; set temperature limit for heater 0 to 120C M308 S1 P"temp1" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as Termistor on pin temp1 EXTRUDER TEMP M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1 M307 H1 R5.007 K0.417:0.603 D2.71 E1.35 S1.00 B0 V23.6 ;M307 H1 R5.395 K0.416:0.839 D2.53 E1.35 S1.00 B0 V23.7 ; PID Tune M143 H1 S300 ; set temperature limit for heater 1 to 300C M308 S2 A"Chamber" P"temp2" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin temp2 CHAMBER TEMP SENSOR M308 S3 A"CPAP Pump" P"temp3" Y"pt1000" R2200 ; configure sensor 0 as thermistor on pin temp3 CPAP TEMP SENSOR M308 S11 Y"mcu-temp" A"MCU" ; defines sensor 10 as MCU temperature sensor MCU TEMP SENSOR ;M308 S12 Y"drivers" A"Stepper Drivers" ; defines sensor 11 as stepper driver temperature STEPPER TEMP SENSOR ; ; Fans M950 F0 C"1.out3" ; create fan 0 on pin out3 on Expansion board PART COOLING FAN M106 P0 S0 X180 H-1 ; set fan 0 value. Thermostatic control is turned oFF M950 F1 C"out7" Q250 ; create fan 1 on pin out7 and set its frequency EXTRUDER FAN M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on M950 F2 C"!out5+out5.tach" Q250 ; create fan 2 on pin out5 and set its frequency MCU COOLING FAN M106 P2 H11 T45:60 ; set fan 2 value. Thermostatic control is turned on M950 F3 C"!out6+out6.tach" Q250 ; create fan 3 on pin out6 and set its frequency CHAMBER FAN M106 P3 H2 T30:35 ; set fan 3 value. Thermostatic control is turned on ; ; Tools M563 P0 D0 H1 F0 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; ; Axis Correction M556 S80 X0. Y0. Z0. ; Axis Correction ; ; Input shaping M593 P"mzv" F45.0 S0.1 ; use ZVD input shaping to cancel ringing at 67.0Hz ; Shaping Options "none" "zvd" "zvdd" "zvddd" "mzv" "ei2" "ei3" ;M593 P"none" ; disable input shaping ; ; Custom settings are not defined ; LED Settings ; ;M150 X1 ; Set LED Type ( PRE 3.5.0 FORMAT) M950 E0 C"led" T1 U32 ; create a RGB Neopixel LED strip on the LED port (3.5.0 FORMAT) M150 R255 U255 B255 P200 S10 F1 ; Left side White M150 R31 U81 B255 P220 S11 F1 ; Blue back M150 R255 U255 B255 P200 S10 F0 ; Right side white ; M950 E1 C"io2.out" T1 U10 ; create a RGB Neopixel LED strip in Electric box on the io2 port M150 R255 U255 B255 P200 S10 F0 ; Left side White ; ; Miscellaneous T0 ; Call T0 M501 ; load saved parameters from non-volatile memory -
@Ce72 "Fail Deadly" is simply just the opposite of "Fail Safe". A failsafe relay would open the circuit stopping power from transferring. These SSR style relays all tend to faildeadly if they get too hot. Normally these relays run quite cold, but if its getting towards the EOL, there is a chance its accidently keeping the power on for too long causing heat based pulsing, similar to BangBang z banding. This would explain your PID tuning inaccuracies.
Its very unlikely as these relays are pretty robust, But I have had 2 personally die on me even when they are joined with the officially recommended W70 Passive Heatsink. -
@Notepad Well, I have now changed the SSR, but I am still getting some fluctuation, but at least some are fault free. Here are the results:
M307 H0 R0.863 K0.260:0.000 D5.37 E1.35 S1.00 B0 XXXXXX
M307 H0 R0.875 K0.265:0.000 D5.36 E1.35 S1.00 B0 XXXXXX
M307 H0 R0.874 K0.346:0.000 D5.72 E1.35 S1.00 B0
M307 H0 R0.856 K0.307:0.000 D4.85 E1.35 S1.00 B0
M307 H0 R0.852 K0.301:0.000 D5.32 E1.35 S1.00 B0 XXXXXXXXXXXX = Warning: heater behaviour was not consistent during tuning
My next step of thinking down this rabbit hole of fluctuation is, where I have used RTV to refix the silicon heater could the layer be too thick or uneven (It’s not easy stuff to work with) causing a slow transition of heat, resulting in a slow reaction that the PID loop is struggling with?
Does anyone know of anywhere in the UK, where I can get a good 330 x 330mm 240v high temp (I print a lot of ABS and the like) silicon heater. At a good price and quick delivery? As even Keenovo has started using a NTC 100K thermistor on there heaters which from what I understand can be a pain to setup and not that great for the higher temps.
-
@Ce72 said in Like Z Banding:
NTC 100K thermistor on there heaters which from what I understand can be a pain to setup and not that great for the higher temps.
Bed temps are pretty low compared to extruder temps. I don't see a problem here?
Whenever a NTC failed on me, it was a lousy crimpjob or broken thermistor leg from too much motion. -
@o_lampe Thank you for pointing that out, I have ordered a new heater, and when it's been installed I will post back here the results hopefully it will cure the banding issue.
-
So, this is now confusing, I have replaced the relay and fitted a new Silicon heater back to the original setup, which ran perfectly fine for 2 years. And when I run the PID tuning cycle I now constantly get:
Warning: heater behaviour was not consistent during tuning
M307 H0 R0.779 K0.208:0.000 D5.70 E1.35 S1.00 B0
M307 H0 R0.776 K0.270:0.000 D5.24 E1.35 S1.00 B0
M307 H0 R0.789 K0.265:0.000 D5.85 E1.35 S1.00 B0
M307 H0 R0.779 K0.247:0.000 D5.35 E1.35 S1.00 B0
M307 H0 R0.778 K0.257:0.000 D5.49 E1.35 S1.00 B0Could it be the heater output on the mainboard? Is it possible to use a spare extruder output as I’m running through a relay? To test.
Has anyone got any suggestions?
-
@Ce72 Most likely is that the thermal pad's thermistor is too close to the heating element, so reads higher than the rest of the bed surface when the heater is on (localised hotter temperature), then cools quicker than expected as heat dissipates through the bed. This tends to make the heating cycles shorter as they go on, causing the inconsistent behaviour, and long tuning cycle.
However, the tuning numbers you're getting are all pretty close, I'd think choosing the median for each parameter would be fine. If it triggers heater errors when heating normally, you can manually adjust it, see https://docs.duet3d.com/User_manual/Connecting_hardware/Heaters_tuning#manual-adjustments-to-the-heater-model-parameters
Ian
-
Hi Ian thank you for pointing me in the right direction to set the PID tune.
Then I run some tests to see If the banding had finally gone, unfortunately not so I decided to run some other tests to see if I could isolate the problem or ever just work out what effects the banding pattern.
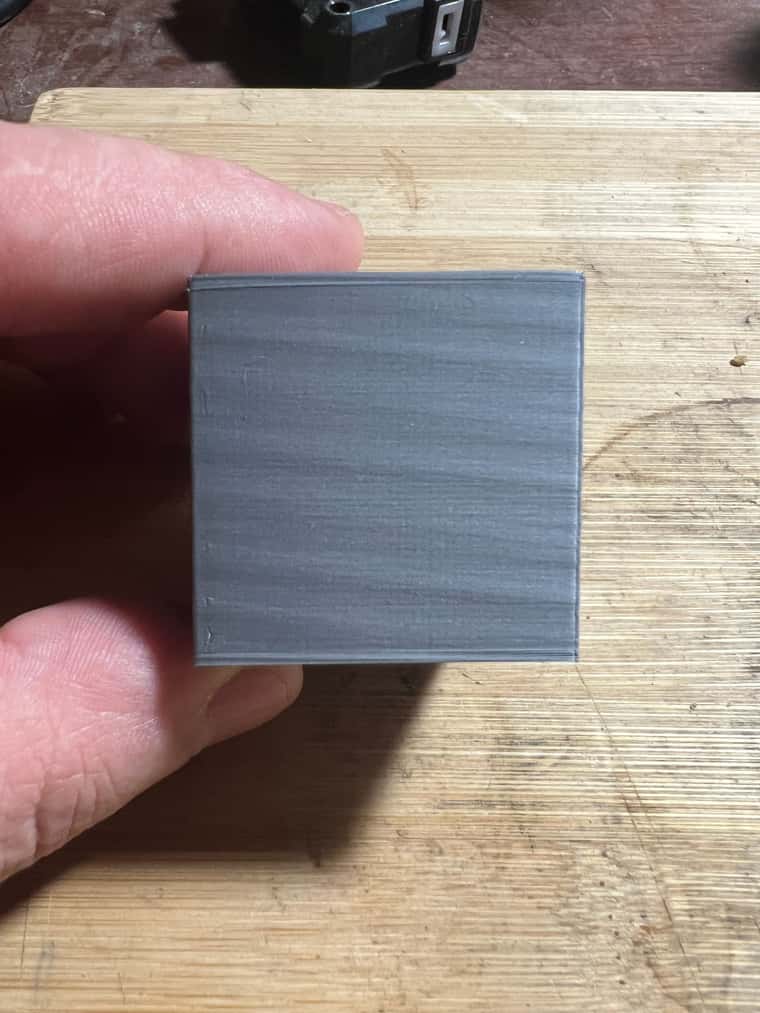
This is the first test print after changing the heater and SSR as well as retuning the extruder PID. banding is the same as before.
The next test I turned off the bed heater after the first couple of layers. To see if the banding was being affected by the bang-bang theory being caused by the bed heater but the banding was still the same. This left me wondering if it was a back to a mechanical issue the good old Z wobble as nothing electrical or extruder seemed to be affecting the outcome.

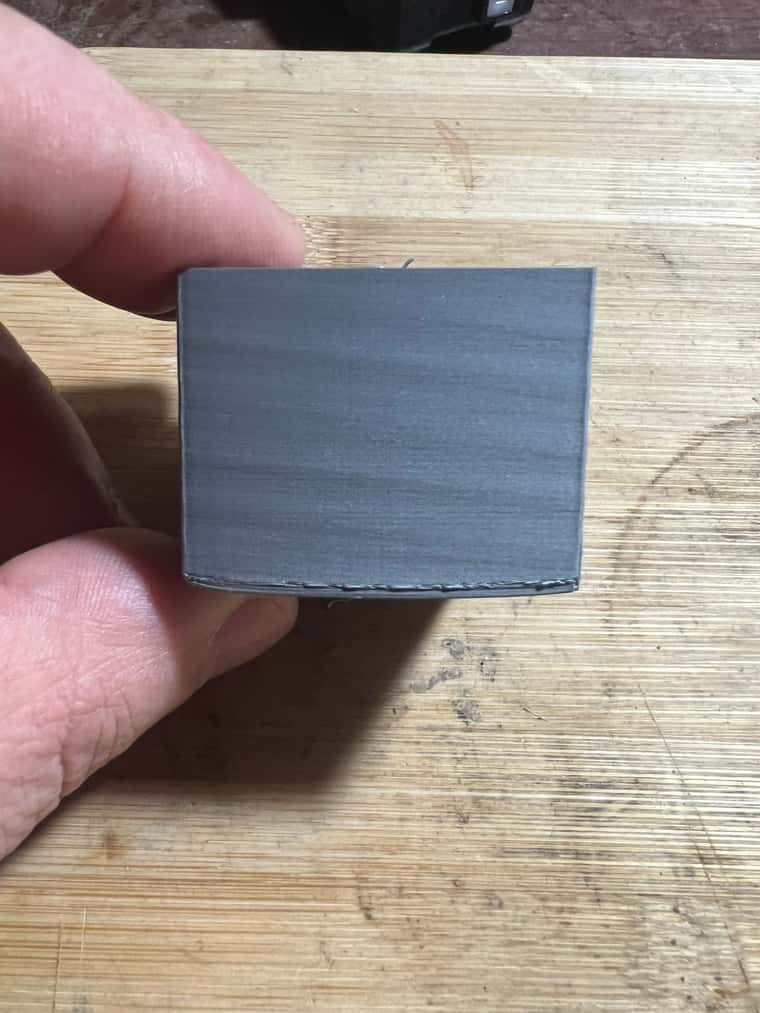
The last test I did after reimaging the pi (hey try anything at this point ) This time I resized the test model from a 40mm cube the a 80mm square by 25mm high same slicing profile as before but this time the banding was a lot closer together than before, To me me this eliminates a mechanical problem as the pattern frequence is so far away from the ball screw pitch.
As mentioned earlier in this thread I have also tried a diffent slicer, so it’s also not that
 I’m running out of things to try so any further suggestions from anyonre would be greatly appreciated
I’m running out of things to try so any further suggestions from anyonre would be greatly appreciated
And sorry for the long post. -
@Ce72 Just to eliminate it as a possibility can you turn of Pressure Advance to see if there is any effect.
-
@tas Hi, Here's the result of of No PA

-
I'm inclined to think it's a mechanical issue either in the extruder or Z axis.
-
Here's a wild theory - there's some interaction between the bed heater and the extruder heater, such that when the bed heater turns on, the power to the extruder heater is reduced slightly, leading to small variations in the flow of plastic. If the duty cycle on the bed heater is regular, it could lead to a regular pattern in the output.
It seems unlikely because the relay you pictured shows your bed is heated by AC. But maybe something on the control side is sinking too much current.
You could test by monitoring the voltage and duty cycle to the extruder heater.
-
@mikeabuilder Hi, Thank you for your thoughts, but after going down the rabbit hole replacing the SSR and bed heater, I tried running a test print with the bed heater turned off to try and eliminate the bed heater and I still had the same results. but I'm not that clued up on electrics to know if that would negate any effects.
-
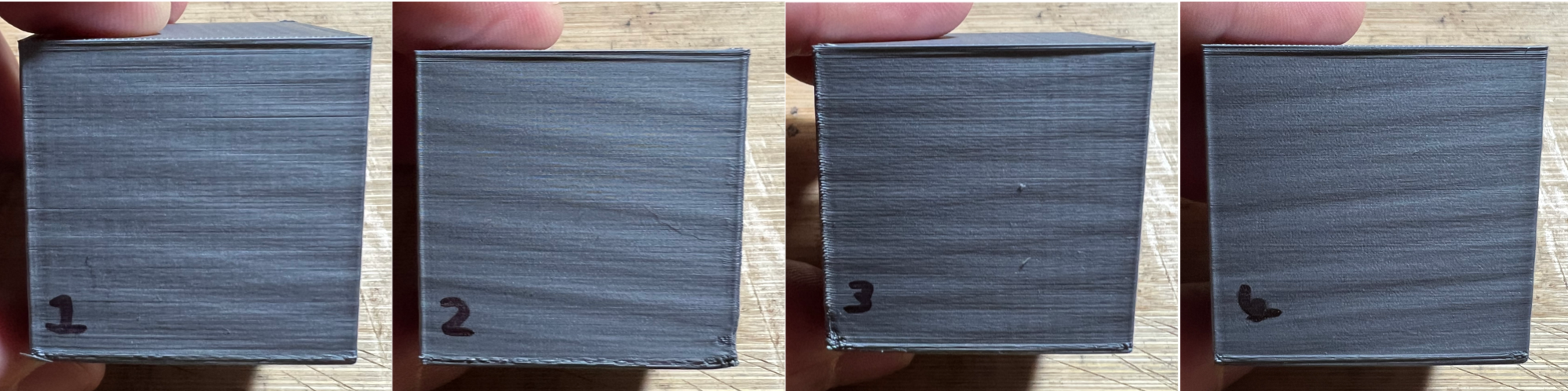
@Ce72 Hi, thank you for your input and any suggested test are much appreciated. I have tried changing the extruder gears and that unfortunatly had no effect, as for z wobble I would have thought the pattern would be the same on all faces, but what I have noticed is that the pattern changes direction and not on opposite face so it just adds to my confusion
-
@Ce72 Are these printed square to the XY axis? If so, try printing at 45 degrees to XY. As your printer is a core XY, this isolates the movement of each motor. As it seems to change direction depending on which side it's on, I'd guess that it's actually something to do with either the X or Y axis. How are the second motors on each of the X and Y axes wired? Are they wired in series (or parallel) with each other, so each axis is running from one stepper driver, or is each XY motor wired to it's own stepper driver?
Check all stepper motor pulleys are not moving on the stepper motor shaft, and that all motors are actually moving under power (ie no cabling issues). All motors should be exactly the same. Maybe post your config.g, and response to M122.
Ian
-
If you're going to print more tests, you could make an 8-sided box to enable looking at X-axis, Y-axis, and also each motor separately. You might also make that shape a "stepped pyramid" to be able to see if artifacts are starting at the corner (which might imply something to do with print head acceleration or extrusion speed). Your pictures posted on 16 Fed look like they have a very slight step at the bottom of the part, which gave me this idea.
Other thoughts after looking at the picture of the printer posted on 11 Feb...
Is there anything other than the shaft couplers preventing vertical motion of your Z lead screws? On my printer, I had some issues with z-banding and I switched from couplers like those you are using to the spring kind (which allows more Z movement). Then I put a screw collar (https://www.amazon.com/Shaft-Collar-Aluminum-Thickness-Screws/dp/B0BNZ937MV) on each z-shaft and put a thrust bearing (https://www.amazon.com/uxcell-F8-16M-Miniature-Bearings-8x16x5mm/dp/B07QLTXJDH) between that the the top of the lower bearing. Finally, I designed a spring loaded thing to put above the top of the shaft and keep a downward force on it. That cleaned up my z-banding.
On another printer, I had an issue where the threaded z shafts were not perfectly straight and they were moving the cars on the Z tracks slightly (again, z-banding). On this printer, I added oldham couplings (https://www.amazon.com/2-Pack-Coupling-Couplers-Compatible-Printer/dp/B0B17QWTG2) between the lead screw nut and the bed supports. It looks like you've maybe got something equivalent there. If so, these would isolate shaft wobble., but you might look for anything else that might be applying a force to the bed supports or the bed itself. It looks like there's a cable that may be tie-wrapped to the rear 2020 bed support. Better to tie wrap that the the lead-screw nut below the wobble decoupler. Any forces it applies will be isolated by the wobble-decoupler. The wiring from there to the bed would them have constant forces.
I think I might also be seeing a spring for a bed leveler on the right front corner (hard to tell for sure in the picture. If there isn't a hard connection for leveling (meaning the spring is holding it in place), that's another possible place for movement to happen if there are small irregular forces on the bed assembly.
Another thing to thing about is how rigid the print head is on the slider on the bridge. If there is any "play" in the slider, then the cables going to the print head might be wiggling the print head. If the extruder is "far" from the slider, it will amplify tiny movements.