Proof of Concept: The CoffeeMaker
-

User name checks out.

-
Interesting idea to link the steel rods to the motor shafts. As timothyz pointed out, bearings could become an issue. However, you could modify the couplers so that they have a regular radial bearing on the side that the couplers connect to the engine shaft and fix the coupler body to the motor body. This will eliminate the rotation of the steel guide rods, making them into "normal" linear moving rods only.
-
How did you get a Duet to be this noisy?
The design is wasting a lot of space on the XY plane, and not gaining much from it. And you move a lot of weight around for no real reason.
The couplers have to be 100% centered, and I doubt these are, as they are tightened from one side.
At least put the motors "outside" the moving area, so they "stick out" of the frame. This will increase your printable area around 10cm on both axes.
Lots of design issues IMHO
-
Here goes...
The bearings in the carriage are brass and graphite.
Honestly, holding a finger to the carriage while doing an air print, I could feel no more vibrations than on my Ulitmaker clone Creatbot.I'm probably going to keep this as a test bed and start another one with atleast a 400 x 300 build area. This one could do 280 x 280 but I never intended to complete it.
LMAO at Phaedrux !!!
I know that non rotating rods would be proper, but connected this way should keep the motors in sync and square.
It is dead silent compared to the over the top crappy drivers in my Creatbot.
The design is not wasting space. There was no previous assumption of how much it would have.
I don't know, I have not noted any vibrations or binding, so, the couplers seem to be centered.
If I put the motors on the outside, the frame would swing wildly about, it would be hello to fashion an enclosure for ABS printing and the output shafts would not be where they need to be. -
A fun little test... Video here: (3x normal speed) https://vimeo.com/275442255
I have a ton of parts coming and will begin in earnest, next week, building this machine's bigger better brother with an expected buld volume of ~ 440 x 340 x 300.
BTW, things like below are what I really enjoy working up and printing. Art does not have to be precise, only well received by the eye and keeps stress levels down over things like a print being off by a half mil. on an axis.



Cheers and stay tuned!
-
Nice build concept but make it really sense to raise the moving mass with about 600g per axis? ( aprox. 300g per steppermotor) doing a nice fast circle thats 1.2kg that have to be accelerated..sound that you have to use slow accelations. Is there any drawback if you put the motors stationary at the frame..like all other UM stlye printer?
I love my delta but if i ever build any cube style printr it would be a UM Style
-
If you do that maths, you'll find that mass isn't nearly the limiting factor that seems to have become ingrained in the 3D printing community. My Diamond hot ends mounted on two parallel X rails weighs in at around 1.8 Kgs that have to be moved in Y and I have demonstrated print speeds at up to 300mmsec. My 5 extruders are on a separate gantry, mounted above the hot end, which follows the hot end gantry and this assembly weighs in a 4.2 Kgs but is driven by it's own motors. The total mass is 6Kgs that have to moved in Y and my default non-print move speed is 350mm/sec, for which you need to run high accelerations.
-
@deckingman said in Proof of Concept: The CoffeeMaker:
If you do that maths, you'll find that mass isn't nearly the limiting factor that seems to have become ingrained
I miss a decision matrix and common document in the 3d community where the decision factors are aggregated. All those heatbed, mechanical construction, mass, direct drive vs bowden, belt vs wire discussions and no definite, physically (and economically, size etc.) proved scientific decisions. When I watch the hundreds of 3d constructions, my brain is trained to say "this printer has good stability, but heatbed awful" etc.
-
Most People would say, that a CR-10 is not a good design..moving the bed into Y and its get heavier with print time and size. and your design seems to even top it with 4.2kg. for me its the opposite what to use to get fast and exact printings..keep moving mass low. And thats physics. Sounds like you have the bumblebee of 3d printers..physics would say her wings are to small to fly properly..but it does
Your non printing moves could be at mach1...doesnt matter except the wear on the mechanic would be bigger...but how good and fast can you print 90° corners? Won´t the nozzle overshoot it?
Till i saw your design i thought the next lightweight concept after a Delta is the UM style
-
The 4 kg is only possible because you have a stable construction which supports it. If you need a light printer to be portable, you would have mass constraints. It all depends on those requirements of quality, cost, weight ...
-
Wow. Does no one have any fun with 3D printing/printers, everything has to be really technical?
-
@coffee I bet they would love the deltesian.
https://bornity.com/deltesian-hybrid-3d-printer-large-format-print-test-jan-4-2018/
-
I don't care what it's slingin', that sucker is fun to watch!
-
@ Coffee
Of course I have fun - much of it is doing what people say you should not - don't worry about the mass, just do it.@ Joergs. A suitcase is portable and might weigh 20 to 30 kgs so.... My printer is sort of portable, it weighs a lot less than 20kgs in total - just need a big van.

@ Barracuda. Of course I can do 90 degree corners. Why would the print head overshoot? - that's a function of rigidity, not just mass.
Yes, of course it's physics and reducing the moving mass is a sound principle but only within limits. Once you reach the lower limit of practical mass for the speeds and acceleration desired or which are otherwise attainable , there is no point in reducing it further.
Like I said, do the maths. A very conservative calculation of the torque that my steppers can produce tells me that I can accelerate my 4kg mass at 1400 mm/sec^2. With my print bed size of 360mm, then in theory I could reach a speed of a tad over 700mm/sec. Reducing the mass would allow me to accelerate at a higher rate and reach an even higher speed but why would I want to move faster than 700mm/sec?
Or put another way, to reach a print speed of 100mm/sec (which is faster than most people use) at an acceleration of 1400mm/sec that speed is reached in 0.071 sec and it takes 3.57mm of movement to attain that speed. Halving the mass to 2kgs would halve those numbers to 0.035 secs and 1.8mm, halving it again to 1 kg brings the numbers down to 0.017 secs and 0.9mm. So we quickly reach a limit of diminishing returns IMO at anything below about 1kg .
Of course there are gains to be had by reducing the mass further but my point is that those gains aren't as big as most people think they are - especially when you look at the difference between say 300gms and 200gms. You are very unlikely to be able to make use of the extra acceleration that the reduced mass makes possible. Maybe on a Delta it's a necessary consideration because of the way they are constructed but if you build a rigid frame, high moving mass is not such a big deal as most people think.
-
Hi @coffee,
I'm with @deckingman. Theory is great and everyone has an opinion about this or that, but there's no substitute to actually building and testing things out in reality. So keep it up!
")
Also, I wanted to ask if you would mind sharing your config.g? I'm curious as to how you mapped the drivers to run each pair of steppers.
-
@snowcrash I appreciate those words and that is the way I feel toward others and their undertakings as well!
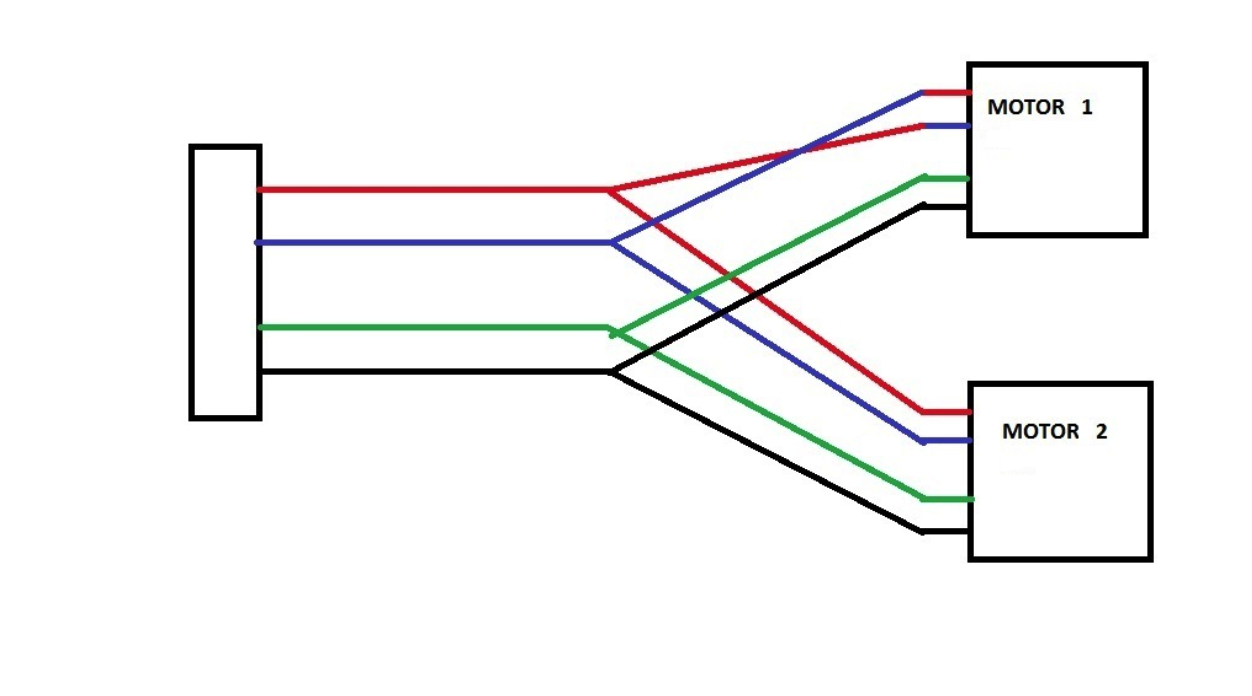
The stepper pairs are just wired in series and out of phase, with one pair connected to the X driver and the other pair connected to the Y driver, using splitter adapters I made up from some extension cables I had sitting around.
Below is this project's stepper wiring diagram.
-
Thanks for the info and diagram, @coffee!
In terms of connecting the steppers in series, is there an advantage to hooking them up like you did as opposed to this setup:

-
Most discusions I had read seemed to believe that series was better at keeping equal current to the motors and that that would be better for tourque. Actually what led me to the Duet board 6 months ago, was from this reading and it having a dual Z series connection already onboard, since with the first printer I built, I knew I wanted dual Z motors. So, since it looks like the board usese the same drivers for all, then it should be able to handle dual motors on all connections and series wired and be perfect for this concept and this is just what I chose to do. Ramble mode off...
There seemed to be 3 mindsets on this: series is better, parallel is better and both are good depending on your particular situation.
I actually have no pure technical advice on this, it's just what I felt was good for me. -
@deckingman your arguments about masses is interesting and I will rethink the opinion I have about it. But why did you separate your printer into hotend and stepper layer? I thought the reason was the masses.
One advantage of higher moving masses is that the higher mass will result in higher inertia and due to it in higher linearity of movement. I mean not only linearity in speed, but also laterally in relation to vibrations.
-
@joergs5 said in Proof of Concept: The CoffeeMaker:
@deckingman your arguments about masses is interesting and I will rethink the opinion I have about it. But why did you separate your printer into hotend and stepper layer? I thought the reason was the masses.
One advantage of higher moving masses is that the higher mass will result in higher inertia and due to it in higher linearity of movement. I mean not only linearity in speed, but also laterally in relation to vibrations.
My printer kind of evolved into what it is now - and in fact it continues to evolve. I can't couple extruders directly to the Diamond hot end because the heat sinks stick out at and angle of 22 degrees, so with direct drive extruders attached (even if I could) it would just make the hot end too wide and I'd lose too much travel in X and Y.
The extruders have to go somewhere and because the bed is 400mm x 400mm, if I'd fitted the extruders to the frame, I'd have ended up with Bowden tubes at around 600mm long which I don't want. So I hit on the idea of mounting them above the hot end.
Originally, they were suspended above the centre of the bed, using pulleys and counter weights a bit like flying extruders on a Delta.
That wasn't entirely successful as the Bowden tubes were still about 300mm long. So I then decided on a separate gantry. At that time I only had 3 extruders and they were passively driven by the hot end gantry. That is to say, I connected cords between the hot end carriage and the extruder carriage. So when the hot end moved, it dragged the extruders along with it. That worked well enough and for short moves, the extruder gantry stayed almost stationary because there was some slack in the cords and the Bowden tubes took up the small moves. But at high speed and with long moves, the extruder gantry built up a fair bit of inertia which tended to try break the cords, and would have jerked teh hot end had it not been securely mounted.
At that time, the hot end gantry weighed about 2Kgs and so did the extruder gantry so about 4Kgs in total. Then when I upgraded to 5 colour, I realised that the extruder gantry would weigh nearer 4 kgs on it's own, so it didn't seem to make sense to have this dragged around by something that weighed only half that amount. That's when I added motors to the extruder gantry and created a CoreXYUV. U and V are only used for homing, after that both sets of motors are mapped to X and Y, so as far as the Duet is concerned, it's just a CoreXY when printing (but it's now using 2 pairs of motors). So in theory, I could double the accelerations that I quoted above and print even faster but what's the point? I use travel moves of 350mm /sec now.
You are correct in that one advantage of higher mass is that it damps out vibrations. I never get "ringing" or any sort of motor or belt induced ripples on the print surface and I think that's due to having high mass. With a super lightweight hot end, any vibrations, howsoever caused will get picked up by the hot end, and if it happened to be fixed with those awful groove mount arrangements, those vibrations are likely to get amplified at the nozzle tip. The higher the mass, the lower the resonant frequency so the less likely it is to vibrate.
That's how I see it anyway, but don't take any notice of me - I'm just an old guy.