Five bar parallel Scara
-
@bondus Nice speed. I have good speed even with my 1:30 gear. Your moves outside the print area are valuable for tool changers.
-
@bondus did you see you made it to Hackaday?! https://hackaday.com/2020/03/18/a-practical-dual-arm-scara-3d-printer/
Ian
-
Oh! Hackaday! I'm famous!
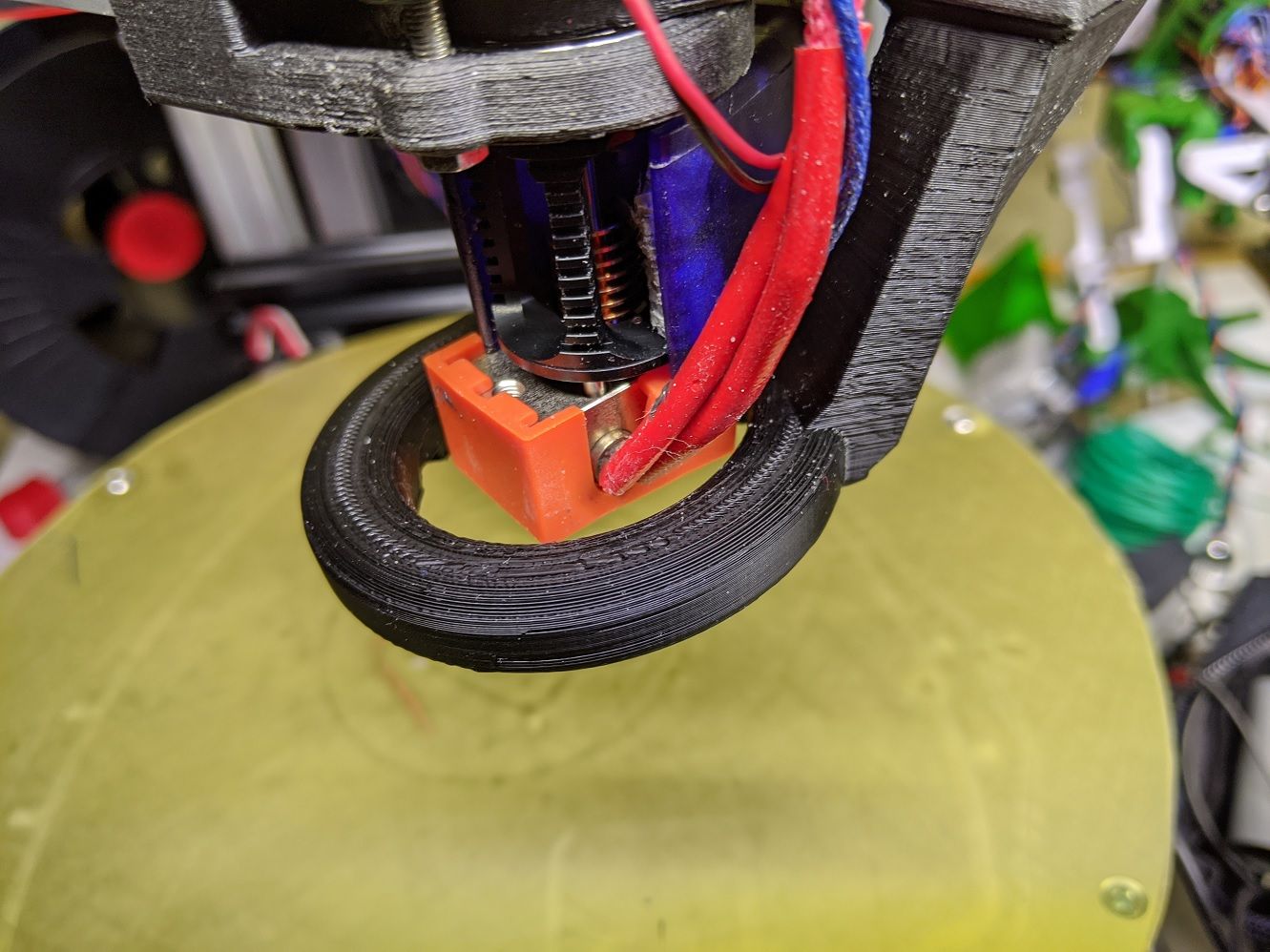
I spent a few hours being confused in Fusion 360, and eventually managed to make this manifold fan duct for parts cooling. It seems to work ok. But cooling PLA at 120mm/s is not easy.
That "transparent" PETG makes everything you print in it look horrible.

-
I have tried to tune this beast for a while now to be good at general printing. But that long bowden tube is hard to tame.
Others seems to be ok with this, I can't do it. Always plastic where you don't want it or nozzle clogs.I made my delta flying extruder and my CoreXYs direct or nimble.
A direct drive is minimum 300g, which is a bit heavy for this mechanics to carry in the z axis.
And what is the consensus for a good part cooler? My homemade ring cooler does not work very well.
-
@bondus said in Five bar parallel Scara:
And what is the consensus for a good part cooler? My homemade ring cooler does not work very well.
Need a good radial blower with enough static pressure to work well with a duct like that.
-
if you want to save a bit on a direct drive weight, you can look at what the Voron people did for their newly released Voron0: Go Nema14 on all steppers. They released a shrunk version of the BMG design that fits on a Nema14 stepper. You save about 80g compared to a Bondtech with a Nema17 with enough torque.
-
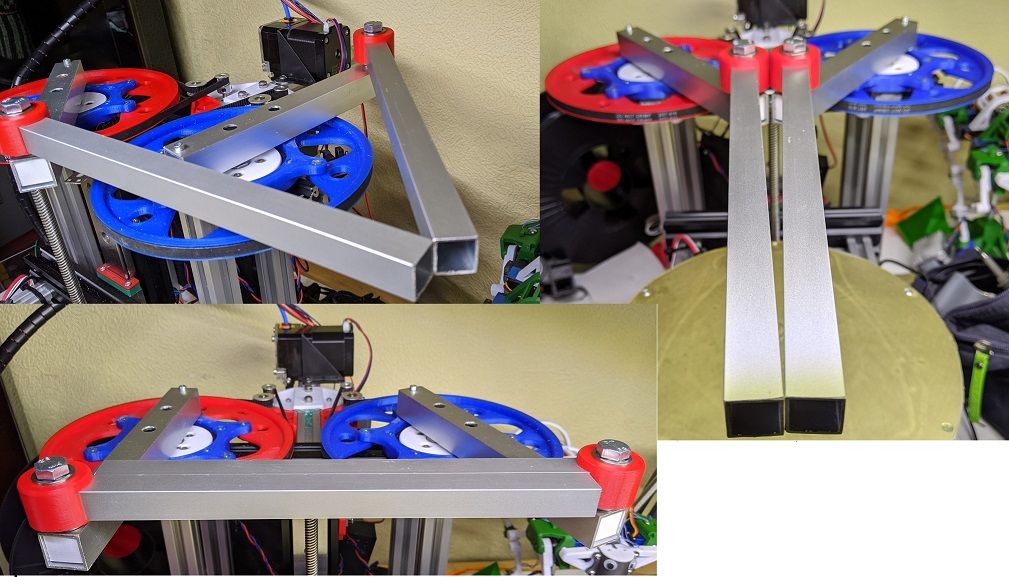
A hint for everyone building a parallel scara:
Before mounting the head move the arms around in all kind of strange positions and make sure that the distal arms are at the same height (or at the offset you designed them to have). Especially try to reach the same spot with different arm-angles. If they do not line up everywhere it will be impossible to get flat XY movement in the z-plane.
It can be quite a lot of work to get it all right but it is at the same time a kind of self-verification of the machine that all joints rotate perpendicular to the same plane. A very nifty feature.
I had to use a mixture of gentle filing on some plastic pieces and brute force bending and twisting the aluminium tubes to get this machine straight. Alu-extrusions from the local hardware store are not made for precision machinery.
-
Any update to this amazing project? I've been wanting to build a Scara type printer for awhile now. had Nicolas' Project HELIOS and then his updated version but it went silent. I see you're using a dragon hotend too. Think your design (when it gets released) will work with a mosquito hotend + precision Piezo orion? Thanks!
-
@iamthebest22 No updates I'm afraid. It works perfectly fine, I use it to print various small parts for other projects. The accuracy is not good enough for big mechanical parts, we need a calibration method for that.
It's actually a very simple mechanical construction. Some parts from my CAD files:
https://a360.co/3dNKGjZ
You have to make your own Z axis")
-
Good afternoon all,
Very interesting subject that I would like to get involved in.
I am a retired Mechanical Engineer and would like to use this new approach to build a CNC machine.Is there a way to get hold of BOM please, I have downloaded the printable file in STEP and DWG, what I would like to know is, is it possible to use ARDUNO UNO with the CNC Shield to make this robot work.
Would appreciate a feedback please on proteus3d@free.fr
Cheers
Siamak -
@siamak Arduino Uno is a 8 bit based hardware, the ReprapFirmware is not ported to it. Even if ported, the Arduino is probably not fast enough to calculate the kinematics, because for calculation some trigonometric functions are used.
A 32 bit based board is needed like Duet 2, Duet 3, Duet Mini 5+, and a port to STM32F4 and a specific LPC board exists. The Duet boards have stepper drivers themselfes, so no CNC shield is needed.
I have no BOM, but currently building a new parallel Scara printer and can tell you the material needed.
-
-
@o_lampe Arduino Due is 32 bit, but the mentioned Arduino Uno is 8 bit.
Arduino Due is at it's end of life, which means less support and buying costs more than in the past. There are technical limits with Due which limits portability of RRF, please see https://reprap.org/forum/read.php?2,769032,page=10 and https://github.com/Duet3D/RepRapFirmware/issues/193 statements of dc42. The mentioned SAME70-XPLD board is a possible build target in firmware and is maybe supported. But one needs stepper drivers addtionally.
closed support for RADDS/RAMPS-FD with wifi/eth #193
-
-
@o_lampe I have no golden rule and use about 1:30, but my thoughts are:
One can calculate the resulting
- precision of the result (+- 5% of 1.8 degree of each stepper => resulting tolerances for result, but precision depends on the print position also)
- resulting speed (stepper speed divided by ratio)
Higher ratio means better precision, but lower speed, if the gear is perfect.
-
 undefined T3P3Tony referenced this topic
undefined T3P3Tony referenced this topic
-
Hi, I'm building a 5bar scara 3D printer because I would like to make a really competitive time in the speedboat race and 5bar scara seems the best kinematic to do so.
I have read in the first post made by @bondus that the gear reduction for the motors needs to be really precise, I was looking at this geared nema 23 for my build do you think it's good enough?
Thanks in advance for your precious help,
gnmrc -
I'm afraid they mention 1.6° backlash under 'no load' for the gearbox. That's a lot given the small angles it takes to move the toolhead.
You'd need a belt driven system with no backlash. -
@o_lampe
I have also found another gear box with only 0.3 degree of backlash but maybe it’is still too much(?).For sure a servo motor directly coupled to the arm joint would be a better choice but it will make the system more complex.
