Pressure Advance on Direct Drive
-
Have you tried running a pressure advance calibration? It should tell you the optimal value for your printer. E.g. some tests are discussed here https://forum.duet3d.com/topic/6698/pressure-advance-calibration
-
@deckingman
Thanks!
By your explanation, I would guess I am having issues that could be resolved with Pressure Advance.
Currently when there is a retraction, seemingly of just about any distance always leaves a gap. I see this alot (depending on filament) on infill and supports.@zapta
Thanks! I forgot all about that post. And now remember why I stopped. It seems way over my head. Maybe for the most part that I don't feel my Acel and Jerk are set correctly to make it work properly. I do need to figure out how to run the calibration scripts too... after I am able to get Acel and Jerk set. I have them pretty conservative based on what my printer is capable of... And I wasn't able to get pressure advanced to work... WIsh I understood this better, but never found good explanation for a noob. -
I'm guessing, seeing as you're using George's V6 mount for the V-Core, that you're printing with a BMG extruder and E3D V6 hot end on the RatRig V-Core?
Although I'm not using George's design, I have a very similar hot end mount on my V-Core with about 35mm between the bottom of the extruder and the top of the hot end's heat sink. It's probably a slightly larger distance than you have due to the Orion piezo sensor.
Here's a picture:
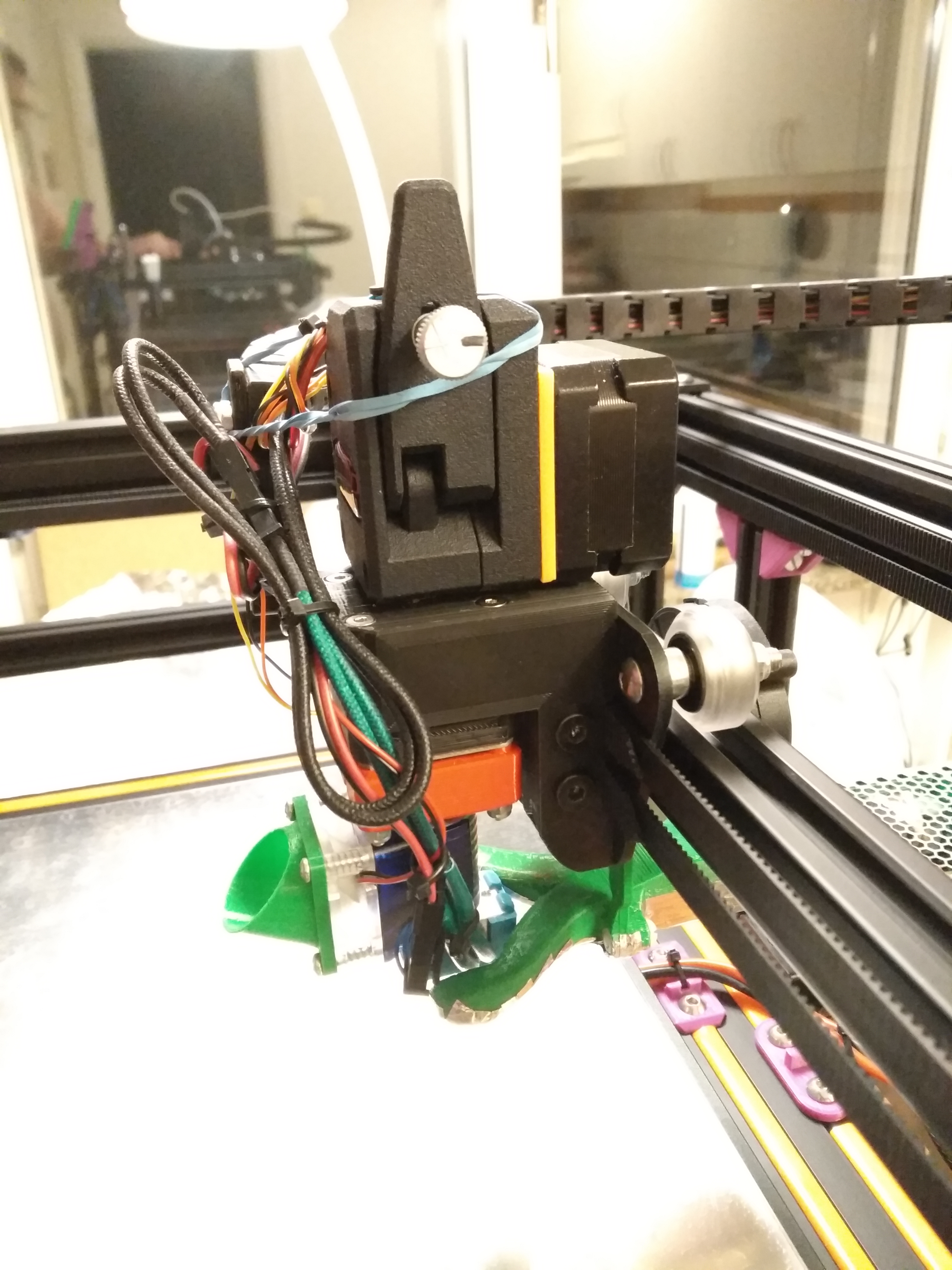
(The rubber band is a temporary feature due to me nearly ripping my cable chain support off during some testing.)
I used the method for tuning pressure advance which is detailed in the thread that zapta linked to. After many prints, I came up with a value of 0.11 for my machine and it seems to work very well. If I print a 100mm hollow square with three perimeter walls, I see no bulging corners or under extrusion at the start of a perimeter after a layer change, even when printing the test at 150mm/s.
With your slightly shorter distance between the extruder and hot end, you might like to try experimenting at around 0.08 as a starting point.
-
@grizewald
Thanks for the info. Knowing you are also using a V-Core Core XY frame... What are your Acceleration and Jerk settings? -
@BlueDust This is what I currently have set:
M566 X600.00 Y600.00 Z100.00 E3600.00 ; Set maximum instantaneous speed changes (mm/min)
M203 X18000.00 Y18000.00 Z600.00 E3600.00 ; Set maximum speeds (mm/min)
M201 X600.00 Y600.00 Z180.00 E3600.00 ; Set accelerations (mm/s^2)
M906 X1600.00 Y1600.00 Z1800.00 E595.00 I30 ; Set motor currents (mA) and motor idle factor as percentage of normal currentBut I'll turn the acceleration down in the slicer to 300mm/s^2 for print moves and 500mm/s^2 for travel moves. As I've just rebuilt the machine to a V2, these may be a bit conservative. With the new 9mm belts set fairly tight, I'm seeing zero ringing with a print speed of 60mm/s (infill 80mm/s outer perimeter 30mm/s), so I'll be experimenting to see what the limits are with the new configuration.
The Z stepper motors are the original 2.5A 1.8° motors which RatRig were supplying with the kit. The α and β motors are 2.0A 0.9° motors which I swapped to for more resolution on the X and Y axes.
The theoretical maximum acceleration with these motors is 5700mm/s^2 assuming that my print head weighs around 500g but I wouldn't actually try to accelerate that fast!
The settings for the BMG extruder are really high so that pressure advance can take all the performance it needs. It's unlikely that the actual speeds are even close to those settings.
-
@grizewald
Thanks!
I will experiment a bit with this tomorrow. -
Even with the very short path of my Titan Aero I get a good benefit using pressure advance. Usually between 0.03 and 0.06. For best results you'll need high extruder accel and jerk values. (3000 ish or more for each)
-
@Phaedrux said in Pressure Advance on Direct Drive:
Even with the very short path of my Titan Aero I get a good benefit using pressure advance. Usually between 0.03 and 0.06. For best results you'll need high extruder accel and jerk values. (3000 ish or more for each)
How does this benefit manifest itself?
Thanks.
Frederick
-
It's most noticeable on very short solid infill sections with quick back and forth movements. Without PA I get over extrusion in these areas even though extrusion in other areas is perfectly fine. With PA the over extrusion is limited. It also helps with reducing the amount of retraction needed, which is already under 1mm.
-
@Phaedrux said in Pressure Advance on Direct Drive:
It's most noticeable on very short solid infill sections with quick back and forth movements.
Thanks for the info.
Frederick