Help me get connected to my Duet2Wifi
-
@Phaedrux just as the forum is not flooded with people having problems on social media you don't see anyone who is using it successfully either and most people recommend against attempting it. In fact on the group for the Sec kit there are plenty of people who have swapped to a duet but went through the trouble to design mounts for ends top switches on a machine designed to use senseless homing and not a single person in the group I have seen has senseless working. Im not crusty just pointing out the night and day difference between setting up senseless homing between duet and a marling board. Marlin has a single setting to make homing less or more responsive and doesn't require over a day to set up correctly. Simple fact is it is way easier to do on marlin and Duet3d for all its advantages over marlin is clearly falling short on senseless homing compared to marlin. Again not crusty just facts. Kind of like being a Alcoholic. You can't begin to make things any better if nobody will admit they have a problem.
With that said.. Yes the printer worked just fine on Marlin before the board swap and had zero problems homing without endstop switches.
I did try every combination of current from 800-1400 and adjusting the drop current settings from %50-90 on every current setting. I also played with feed rates but in general were moving the wrong direction collectively. on the standard current and feed settings I could get it to home on occasions but all the suggested alterations have resulted in not a single successful homing move.
As for the motion system it was smooth when build only around 6-8 weeks ago but I can remove the belts to confirm its not contributing to the problem.
At this point I have already designed and printed manual endstop mounts as it will be the shortest distance to get to a usable state for the board. -
@Kwad3d we have an example of sensorless homing for a corexy on the wiki for the LPC port.
Info here https://github.com/gloomyandy/RepRapFirmware/wiki/Sensorless-Homing -
@jay_s_uk I think I just have to accept the fact that it is not for me. I run a business and I need dependable homing on a machine that will run 20+ hours a day. I can only imagine I will have to go through all this again in the future as the printer ages or when upgrading something. The concept of leaving the machine as it was designed to be used was what I was after but obviously RRF has some work to do on this front. If Marlin can have a single setting to adjust the sensitivity then I see no reason whey RRF can't get there at some point. so maybe I will revisit senseless homing in the future when a newer firmware version comes around but till then I'll stick with a simple switch.
-
@Kwad3d said in Help me get connected to my Duet2Wifi:
I run a business and I need dependable homing on a machine that will run 20+ hours a day.
Then you can't beat the reliability of a simple switch.
I don't know how marlin sets the sensitivity of stall detection for sensorless homing since it's literally a function of the driver to detect the back emf and stall.
There are examples of working sensorless homing on a corexy. The E3D tool changer uses it for instance. Though corexy presents a challenge for it because of the nature of the dual drive motor setup and the compliance in the belt. The system needs to be rigid to produce a short sharp shock. A cartesian printer with a single motor per axis doesn't have the same issue, so it's a lot easier to tune.
Why it's not working for you, I cannot say. I can only speculate based on what info you've provided. I've offered how I would approach figuring it out.
Perhaps the motors you're using are different than the ones we thought you had?
@Kwad3d said in Help me get connected to my Duet2Wifi:
You can't begin to make things any better if nobody will admit they have a problem.
This is open source hardware and software, if there's a problem, we're all here to solve it and improve it. However, I don't think you've demonstrated there's a problem other than with your setup.
The 2209 and the 2660 are different drivers. Maybe the difference in sensitivity is very different. It's a bit of a moot point since the duet has the drivers it has. Others have gotten it to work without issue, and others have had problems, and yes, a simple switch is usually recommended, because it's cheap, simple, and works reliably.
However, in your case it's detecting a stall immediately, which is the opposite of what you'd normally see as a problem, which is it doesn't detect a stall at all and just slams into the hardstop.
-
@Phaedrux Please don't be offended. I appreciate your patience and assistance on the issue. As I suggested I recommend the Duet team get ahold of a 32 bit marlin based board so you can see where the competition is at with the feature. A company that feels there safe on top can be caught off guard by a competitor who can identify where the need to improve on their product. Now if marlin was perfect we would never be having this conversation. So all Im saying is there is room for improvement in the tuning process.
And yes my LDO motors do Look a little funny compared to the pics of genuine LDO motors pictured so that could be exactly what makes me feel the tuning process is too complicated if they are a cheap clone that does not have the correct specs. I will reply again when I get to adjusting the leveling points for the BL touch. Hopefully I will have better luck on my own this time around as I did set it up before when I originally had the board on my CR-10 but some of the points were a little off. Again I appreciate your assistance. I just can't spend $1000 of my personal time trying to get senseless homing to work when I have other stuff to get done. -
No offence taken at all. Good luck with the rest of your commissioning and feel free to come back with any questions.
-
@Phaedrux Im almost there now. X and Y are homing great now and Im on the BLtouch set up now. when homing Z im getting this error now "Failed to enable endstops".
Here is my endstop and z probe setup
; Endstops
M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop
M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystop; Z-Probe
M950 S0 C"exp.heater3" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X-26 Y0 Z2.5 ; set Z probe trigger value, offset and trigger height
M557 X36:290 Y46:290 S48 ; define mesh gridI have tested the probe and it will deploy, retract, and reset as well.
I tried adding M574 Z1 S2 to the endstop lines but the probe failed to deploy
-
most likely are missing the G30 in your homing files and are trying to hit the none existing endstop
post your homing files
-
You need to change your homez and homeall files to something like
G91 G1 H2 Z5 G90 G1 X150 Y150 G30A probe doesn't use the typical G1 H1 moves to home.
That code above basically lifts the bed away from the nozzle, moves to a position (usually the centre of the bed so adjust taking into account your probe offset) and then it proves the bed at that point to set Z to whatever your probe offset is. -
@jay_s_uk Ok that seemed to get me going.
Now I just have to figure out how to adjust where the mesh starts for each axis. the XY max probe points are perfect at 10mm inside the max points of the bed. However the X is starting at 40mm (62 at the nozzle) and the Y is starting at 55mm.
-
@Kwad3d said in Help me get connected to my Duet2Wifi:
However the X is starting at 40mm (62 at the nozzle) and the Y is starting at 55mm.
M557 X36:290 Y46:290 S48 ; define mesh grid
If it's starting too far inside the limit, increase/decrease the limits in M557
Try X10:290 Y10:290
To make testing faster, change S48 to P2:2, this would result in a 2x2 grid instead of a full detailed grid. Once you're happy with the extends you can switch back to the spacing method, or increase the number of points.
-
@Phaedrux Thanks. Yea I'm slowly getting it where I want by making those adjustments. Despite my negative opinion on senseless homing the BL touch setup it way simpler and easier than marlin which continuously tried to probe off the bed regardless of adjustments made.
-
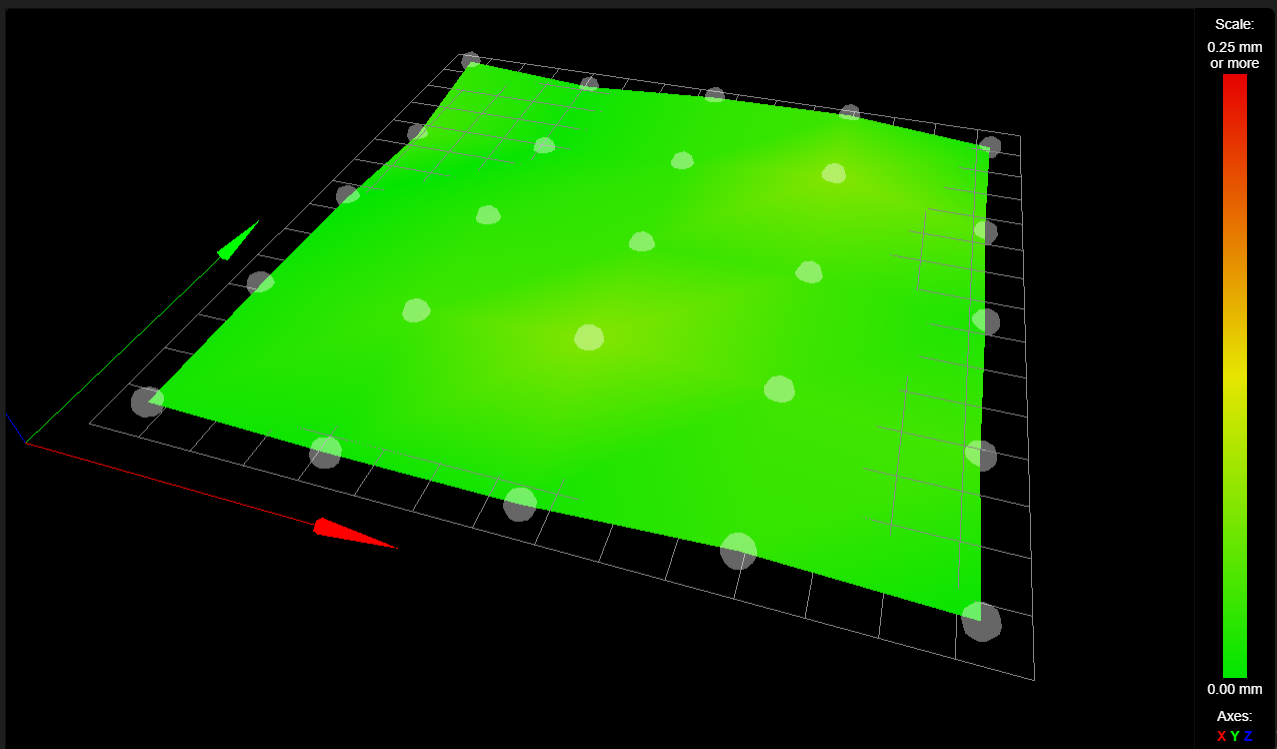
@Phaedrux Seems I got the bed mesh dialed in pretty good. I used previous Hight maps to adjust the bed mounting points and this is my result. Sure its not %100 perfect but I will take it. Hopefully that is the last of the assistance I need. Thanks again for your patience and professionalism
-
@Phaedrux So I think Im done setting up the machine. I got a message when sending M500 so save my pid tune saying "Warning: M500: No M501 command was executed in config.g"
Do I just add M501 after the last line in config.g or am I good to turn it off now?
-
@Kwad3d said in Help me get connected to my Duet2Wifi:
Do I just add M501 after the last line in config.g
Yeah you need to add M501 at the end of config.g to load the saved values at boot from config-override.g.
The saved values are still there in config-override.g whether you turn it off or not.
-
@Phaedrux Hi again. So I ran into a issue with my bed leveling. When I got the probe grid mapped out for my printer I used the hight map to manually level the bed. I did such a good job that I never noticed that the printer was not compensating for irregularities. I recently changed the build surface and now my mesh is no longer as flat as I posted in the pic. Now Im noticing that the printer is not adjusting the z axis for a good first layer. What to I need to do to turn on leveling based off the generated hight map?
-
The heightmap is not loaded at startup automatically. You need to either use G29 to create a fresh map, or use G29 S1 to load the previously created heightmap. That would usually happen in your slicer start gcode after the axis have been homed (and Z has been homed with the probe).
-
@Phaedrux Yea I have G29 in my start G code but the Z axis makes no adjustments to follow the mesh. Here is my G code.
G28 ; home all axes
G29 S1
G1 Z5 F3000 ; lift
G1 X10 Y10 F1500 ; move to prime
G1 Z0.2 F3000 ; get ready to prime
G92 E0 ; reset extrusion distance
G1 X120 E15 F600 ; prime nozzle
G1 X140 F5000 ; quick wipe- -
How are you determining that it's not compensating?
If you send M122 after the print is started, does it show "compensation: mesh"?
-
I marked my Z motor's 20T gear with a black line. There is no movement other than adjusting for a new layer. I entered M122 in the console and this is what came back
M122
=== Diagnostics ===
RepRapFirmware for Duet 2 WiFi/Ethernet version 3.1.1 running on Duet WiFi 1.02 or later
Board ID: 08DJM-9178L-L4MSJ-6JTD8-3S86L-K826N
Used output buffers: 3 of 24 (21 max)
=== RTOS ===
Static ram: 27980
Dynamic ram: 93912 of which 52 recycled
Exception stack ram used: 648
Never used ram: 8480
Tasks: NETWORK(ready,268) HEAT(blocked,1224) MAIN(running,1732) IDLE(ready,80)
Owned mutexes: WiFi(NETWORK)
=== Platform ===
Last reset 105:28:54 ago, cause: software
Last software reset at 2020-12-31 07:13, reason: User, spinning module GCodes, available RAM 8528 bytes (slot 3)
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0041f000 BFAR 0xe000ed38 SP 0xffffffff Task MAIN
Error status: 0
MCU temperature: min 40.1, current 40.5, max 40.7
Supply voltage: min 23.8, current 23.9, max 24.2, under voltage events: 0, over voltage events: 0, power good: yes
Driver 0: ok, SG min/max 0/126
Driver 1: standstill, SG min/max 0/1023
Driver 2: standstill, SG min/max not available
Driver 3: ok, SG min/max not available
Driver 4: standstill, SG min/max not available
Date/time: 2021-01-04 16:43:33
Cache data hit count 4294967295
Slowest loop: 88.77ms; fastest: 0.14ms
I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0
=== Storage ===
Free file entries: 9
SD card 0 detected, interface speed: 20.0MBytes/sec
SD card longest read time 1.3ms, write time 41.5ms, max retries 0
=== Move ===
Hiccups: 0(0), FreeDm: 166, MinFreeDm: 154, MaxWait: 0ms
Bed compensation in use: mesh, comp offset 0.000
=== MainDDARing ===
Scheduled moves: 2501, completed moves: 2493, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: 3
=== AuxDDARing ===
Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1
=== Heat ===
Bed heaters = 0 -1 -1 -1, chamberHeaters = -1 -1 -1 -1
Heater 0 is on, I-accum = 0.2
Heater 1 is on, I-accum = 0.5
=== GCodes ===
Segments left: 1
Movement lock held by null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is doing "G1 X120.948 Y165.948 E2.6605" in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
Daemon is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== Network ===
Slowest loop: 201.12ms; fastest: 0.09ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions
HTTP sessions: 1 of 8- WiFi -
Network state is active
WiFi module is connected to access point
Failed messages: pending 0, notready 0, noresp 1
WiFi firmware version 1.23
WiFi MAC address bc:dd:c2:31:a5:92
WiFi Vcc 3.40, reset reason Unknown
WiFi flash size 4194304, free heap 22840
WiFi IP address 192.168.1.10
WiFi signal strength -54dBm, reconnections 0, sleep mode modem
Socket states: 0 4 0 0 0 0 0 0
- WiFi -