Detachable Probes and Probing
-
@phaedrux said in Detachable Probes and Probing:
I'm not actually sure if it's going to be automatic if the deploy and retract files are present. I
I remember, embarassing myself with a long rant about G30 giving me heart stitches, when it turned out that it does execute the deploy/retract macros. I had an 'Allen Key' switch on another printer, which neede to be deployed and retracted.
It wasn't on RRF3.x but v2.05...did it change?
@sinned6915
easy test would be to add anecho "deployprobe started"in the macro.
-
@o_lampe said in Detachable Probes and Probing:
It wasn't on RRF3.x but v2.05...did it change?
I think it checks to see if they are present and if so will execute them. There have been cases where the files are present when they should not be and deleting them solves a probing problem. So I believe that's the case.
-
@sinned6915 I guess the other question is when you want to pick up/put down the probe. I think that the deploy/retract scripts are called for every probe dive (so doing a 400 point mesh, it will pick up, probe, put down, pick up, probe, put down etc 400 times!). A BLTouch pin needs to be extended for every probe dive, whilst yours probably doesn't.
You might be better putting your own pick up/ put down macros and calling them explicitly in your homing, bed leveling, mesh creation etc macros? -
EDIT: why is my link missing in the previous post? I'l chalk it up to lack of sleep.... video of deply and retract. The following probaly makes more sense now....
EDIT2: I put all my configs and files on github instead of pasteting it all here-
RRF3.x sys folder@phaedrux I was hoping to not get into the nitty gritty, but here goes.
I have explicit deploy and retract scripts and call them in my homez.g and homeall.g scrips. they work there just fine.
if i issue a G29 command, then the bot will pick up the probe and probe the mesh sequetially w/o returnging the probe between point. It runs the whole mesh then returns the probe.
The deploy probe is conditional gcode. Since i am picking it up from a fixed X,Y but variable Z position I have it doing some gymnastics. I do have comment codes in the macros to track its progress.
The probe deploy flow chart is basically:
- after homing X & Y,
- move Z 15,
- translate to dock position in X,Y,
- move Z -10,
- while loop starts
-move Z incrementally -0.5,
-check probe status. if probe value is 1000, repeat, - if probe value is not 1000, exit while loop.
; *********************************************************** ; deployprobe.g ; *********************************************************** echo "Running deployprobe.g" G91 M564 H0 S0 ; allow movement while not homed G1 Z15 F6000 ; move Z 15 for clearance above dock. ; need to figure out some safety check on this G90 ; echo sensors.probes[0].value[0] if sensors.probes[0].value[0]!=1000 ; if sensor is value other than 1000 do this abort "deployprobe start value Probe already picked up. Manually return probe to the dock" echo sensors.probes[0].value[0] ; if we're here we know it's becasue the above is true which I assume is because you have an NC switch as a probe. echo "Pass first logic test" G1 X0.0 Y4 F6000 ; move above probe dock location G91 G1 Z-10 G90 M400 ; wait for moves to finish echo "Probe Pickup while loop running" while sensors.probes[0].value[0]=1000 G91 G1 Z-0.5 F600 M400 G90 ; echo sensors.probes[0].value[0] ; echo iterations if iterations=100 break G91 ; relative coords G1 Z-0.25 F600 ; move bed up to clear probe from dock since mags pull it up M400 ; wait for move to finish G1 X50 F3000 ; move right so probe moves out of the dock G1 Z6.5 F3000 ; move bed to clear probe from glass build surface G1 X100 F6000 ; G90 ; absolute coords M400 ; wait for moves to finish G4 S2 ; wait 1 second M400 if sensors.probes[0].value[0]!=0 abort "deployprobe endvalue not 0 Probe not picked up! Print cancelled." echo "deployprobe.g complete"The probe retract is simpler since the X,Y & are determined-
; *********************************************************** ; ; retractprobe.g ; ; *********************************************************** echo "Running retractprobe.g" if sensors.probes[0].value[0]!= 0 abort "retractprobe: Probe not currently picked up!" echo "pass first logic loop" ; M564 S0 ; allow movement outside of print area G90 ; absolute positioning G1 X100 Y4 Z8.10 F12000 ; move to the starting point G1 X45 Y4 F6000 ; move to the entry position for the dock G1 X0 Y4 F3000 ; move to the dock position G1 X0 Y50 F12000 ; move to the side adjacent to the dock M400 G1 X100 Y50 F12000 ; move to the right to clear dock G1 X145 Y0 F6000 ; move to start point at middle front M400 M564 S1 ; limit axis to print area echo "complete movement commands" if sensors.probes[0].value[0]!= 1000 abort "retractprobe: Probe not correctly dropped off in dock!" echo "retractprobe.g macro complete"@engikeneer funny you should bring up the allen key probe, that was one of the insprirations to my probe design. sort of 'get it when you need it' that and the semi-automatic constant wired probe for i3's you manualy deplyed.
I migrated from a well working 2.05 setup to 3.x. Granted, I had eveything set up differently 2.x with a fixed probe dock and no logic checks, but doing this in RRF 3 it seems to make a bit more sense and has provided some failsafes in the system.
for clarity, here is an example of one of my probe point macros- teh back left corner specifically.
; ******************************* ; probeBL.g ; Probe Back Left Corner ; ******************************* M561 ; clear all transforms G91 ; relative coords G1 Z5 ; move Z up 5 to ensure clearance G90 ; absolute coords G1 X5 Y280 Z5 F6000 ; move to bacl keft corner G30 S-1 ; probe point report status -
@o_lampe what was the reasoning to the conclusion for having the deply/retract macros NOT in the system folder?
I am not seening the conclusions in the posts.
-
If you only need to do the pickup and drop off once then it's not exactly a deploy retract situation. Instead of using deploy retract macros, you could use mesh.g and simply add the pickup and drop off there with the G29 S1 in between. Then when you call G29 it will execute mesh.g, pick up the probe, run a mesh, and drop it off.
-
@phaedrux i am not trying to mesh probe.
i am trying to probe the 4 corners and center of the bed. for example, to validate the results of 4 point leveling.
if i do
G1 X5 Y280 Z5 F6000 ; move to back left corner G30 S-1 ; probe point report statusshouldnt the system realize the probe needs to be picked up?
-
@sinned6915 said in Detachable Probes and Probing:
shouldnt the system realize the probe needs to be picked up?
If you add a resistor voltage divider to your dock and connect it to the probe pin, it would read a certain voltage. That tells the FW if the Z-probe is attached or not. (via conditionals)
With the probe attached, your switch would short out one of the resistors and the value changes to 'probe is deployed, but not triggered'Kind of 'three state' switch probe.
-
@sinned6915 can you summarise the issue? Is it that deploy and retract macros are not being run for G30 but they are for G29?
-
@sinned6915 if you have the probe type set to anything other than 9 (which is for BLTouch) then the behaviour is as follows:
- M401 and M402 increment and decrement the probe deployment count. When M401 causes the deployment count to go from 0 to 1, RRF executes deployprobe.g. When M402 causes it to go from 1 to 0, RRF executes retractprobe.g.
- At the start of executing G29 S1, RRF implicitly executes M401. At the end, it implicitly executes M402.
- When executing G30, RRF implicitly executes M401 before and M402 after.
Therefore:
- When using single G30 command to home Z, the probe will be deployed and retracted automatically
- When executing G29 S1 the probe will be deployed and retracted automatically
- Within a bed.g file that contains multiple G30 commands, when using a deployable probe it is best to use M401 before the first G30 command and M402 after the last one. That way, the probe will be deployed and retracted just once for the entire sequence, instead of once per G30 command.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com -
dc42: thank you for answering the question. Knowing that there is a probe deplyment counter is the key I was missing.
If I may suggest that your succinct explanation get added to G29 & G30 or M401/M402 wiki entries.
Which now got me to thinking to check the Object Model for the token- I dont see anything for probe deplyment. I see
sensors.probes.0.deplyedByUser=true
and
sensors.probes0.value=1000
but no deployment count. Any idea what that might be stored as?
I am thinking it might be more reliable to use that instead of theraw probe data. -
@dc42 I think I have noticed a pattern that may highlight the probe pickp/retract issue. I am using Duet3 Ethernet, RRF version 3.2.2
Case 1: Printer is homed. Probe is detached. Carraige is at X,Y of 100,100
Issue G30 S-1 command to perform a single probe. The expectation is probe will occur at 100,100.
Printer will execute M401 and sucessfuly deply the probe EXCEPT that instead of probing the original position of 100,100, it will execute the probe at the final positiion of the deployprobe.g macro.Expectation is that the printer would have returned to the position (100,100) to perform the probe.
Case 2: Priner is homed, Probe is detached.
Issue M401 P0 command, printer picks up the probe.
G1 move to the point 100,100 and then issue
G30 S-1
and it executes the single probe at the point.EDIT- Case 3 Printer is homed, Probe is detached
Issue G30 X100 Y100 S-1 command, priner will sucessfuly deply the probe and will execute the probe at the final positiion of the deployprobe.g macro instead of the X100 Y100 coordinate.Bothe cases: issuing M402 P0 errors and reports back probe is not present.
Which is because of my gcode metal logic of sensing the presence of the probe via the probe's actual value of 0 or 1000 (open circuit vs closed vircuit).
As the machine stops Z motion at the probe trigger, the probe is still triggered, NC having gone open.
Moving the Z away from the probe will reset the probe back to the NC state and then the M402 script will execute. -
I wonder if you could use G60 to store the location and then use G1 R to restore to that location.
https://duet3d.dozuki.com/Wiki/Gcode#Section_G60_Save_current_position_to_slot
https://duet3d.dozuki.com/Wiki/Gcode?revisionid=HEAD#Section_G0_G1_Move -
@phaedrux you could, but that seems like that would not be nescessary.
The wiki says that if the G30 -S1 command is issued without X or Y coordinates, the probe would occur at that point. To me, that means it will probe the X,Y where the command was issued.
I could just issue a G30 X100 Y100 S-1 but that is different than giving the G30 by itself. I don't remember the results of that offhand and have to redo it when the machine is not in use.
The system realizes that if there is no probe attached, it goes to deploy it. The G30 then seems to occur when the moves of the deploy macro are complete. It has forgotten the starting point.
EDIT: I updated the case of giving a G30 with coordiantes to the original post.
-
@dc42 @T3P3Tony I am pretty certain that something is up with the deploy and retract scheme. The system does not realize that the probe is picked up, even though it has sucessfully picked up the probe.
The approach that I am trying to used is to change the probe pin inversion and do homing moves instead of using one probe type and incremental moves.
Can you answer these questions and offer any guidance?-
Does changing the probe pin inversion reset the probe pickup state?
-
What is the token in the object model that represents the probe deployment state? I can not tell from the OM Browser. Screen snip at the end.
Here is a video of my machine tying to deploy the probe using a G1 move command instead of a controlled incremental move. And for good measure, the macros and config in a zip file if you want to delve deeper.
Here is the commented deployprobe.g file that is running in the video.
; *********************************************************** ; deployprobe.g ; config.g is M558 K0 P8 C"^zprobe.in" H10 R0.5 F240:120 T9000 A3 S0.03 ; *********************************************************** echo "Running deployprobe.g" echo "Reset Probe to NC" M558 K0 P8 C"^zprobe.in" H10 R0.5 F240:120 T9000 A3 S0.03 G91 M564 H0 S0 ; allow movement while not homed G1 Z17 F6000 ; move Z 15 for clearance above dock. ; need to figure out some safety check on this G90 echo "First logic check" echo "Probe State Value" ^sensors.probes[0].value[0] if sensors.probes[0].value[0]!=1000 ; if sensor is value other than 1000 do this abort "deployprobe start value Probe already picked up. Manually return probe to the dock" ; echo sensors.probes[0].value[0] ; if we're here we know it's becasue the above is true which I assume is because you have an NC switch as a probe. echo "Pass first logic test" echo "Move to doc" G1 X0.0 Y-27 F6000 ; move above probe dock location G91 G1 Z-10 G90 M400 ; wait for moves to finish echo "Redefine probe type" M558 K0 P8 C"^!zprobe.in" H10 R0.5 F240:120 T9000 A3 S0.03 echo "M558 Inverted" G4 S1 echo "Probe Pickup while loop running" ; while sensors.probes[0].value[0]=1000 echo "Probe State Value" ^sensors.probes[0].value[0] while sensors.probes[0].value[0]=0 G91 ; G1 Z-0.5 F600 ; was controled move in previous scheme G1 Z-100 H1 F300 ; move in -Z to trigger endstop via G1 H1 M400 G90 ; echo sensors.probes[0].value[0] ; echo iterations ; if iterations=100 ; break echo "Probe Pickup while loop complete" G91 ; relative coords G1 Z-0.5 F600 ; move bed up 0.5 to clear probe from dock since mags pull it up M400 ; wait for move to finish G90 G1 X50 F3000 ; move right so probe moves out of the dock M400 G1 Z12 F3000 ; move bed to clear probe from glass build surface G1 X100 F6000 ; G90 ; absolute coords M400 ; wait for moves to finish G4 S2 ; wait 1 second echo "Probe State Value " ^sensors.probes[0].value[0] echo "Restore probe type" M558 K0 P8 C"^zprobe.in" H10 R0.5 F240:120 T9000 A3 S0.03 echo "Probe State Value " ^sensors.probes[0].value[0] M400 G4 S2 echo "Last Logic Check" echo "Probe State " ^sensors.probes[0].value[0] if sensors.probes[0].value[0]!=0 abort "Abort deployprobe endvalue not 0 Probe not picked up! Print cancelled." echo "deployprobe.g complete"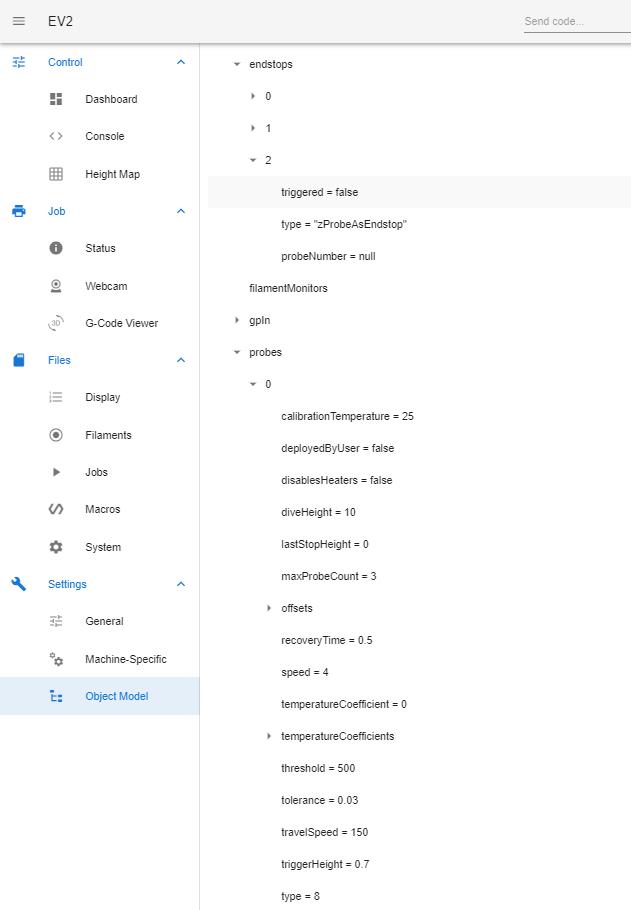
-
-
@sinned6915 said in Detachable Probes and Probing:
I am pretty certain that something is up with the deploy and retract scheme. The system does not realize that the probe is picked up, even though it has sucessfully picked up the probe.
How are you commanding the probe to be picked up? The system should realise it is picked up if and only if you use M401 to pick it up.
-
@dc42 I am explicitly calling M401 to deploy the probe in the homez.g file. Line 13 of the homez.g file
it's already picked up and in position when the G30 command in issued in the bed.g file (4 point leveling, 3 Z screws).
The error message that the system reports from the gcode meta command comes from the M401 file.
If you watch the youtube video, you will see the console messages with the carriage movements.
Console & Machine Video - https://www.youtube.com/watch?v=0A3sT0sjbHsYou can see where in the homez.g macro, where the pritner has has picked up the probe and successfully completed M401, it returns and calls the bed.g macro. Taht is where the M401 is called again and i errs out becasue the probe is already picked up.
; *********************************************************** ; homez.g ; *********************************************************** if !move.axes[0].homed || !move.axes[1].homed ; If the printer hasn't been homed, home it M98 P"0:/sys/homexy.g" M561 ; clear any bed transform M290 S0 R0 ; clear baby steps per Wes C G91 ; relative positioning M400 ; G1 H2 Z6 F6000 ; lift Z relative to current position G90 ; absolute positioning echo "Call deployprobe.g macro" M401 P0 ; This runs macro file deployprobe echo "returned from deployprobe.g" echo "Go to center of bed & probe" G1 X145 Y162.5 F3000 ; go to bed center M400 ; echo "Perform G30 S-2 Command" ; G30 ; Probe the bed at the current XY position. When the probe is triggered, ; adjust the Z offset of the current tool to make the current position Z=0. echo "Perform G1 Z-10 H1 Command" G1 Z-10 H1 ; Move and terminate the move when the endstop switch is triggered and set the axis position to echo "Perform G92 Z2.6 Command" G92 Z2.6 ; Set the Z axis to the probe offset height M400 G91 ; Relative Coordinates G1 Z1 F6000 M400 G90 ; Absolute Coordinates G1 Z10 F6000 M400 G4 P500 echo "Call bed4point.g macro" M98 P"0:/sys/bed4point.g" ; tram bed ; echo "Return from 4-point macro" echo "Re-probe to set Z incase it drifted" G1 X145 Y165 F9000 ; go back to the first probe point and reprobe 0 in case it moved G30 echo "Call retractprobe.g macro" M402 P0 ; retract probe echo "Return from M402" G1 Z10 F600 ; lift Z relative to current position G90 ; absolute positioning M564 S1 H0 ; G1 X150 Y0 F9000 ; move carraige to center front -
@sinned6915 use conditional gcode in the bed file to check whether the probe has already been picked up or not.
sensors.probes[0].deployedByUser
that object should do it for you.
so something likeif sensors.probes[0].deployedByUser == 0 M401 -
@jay_s_uk ok, i will try using that as a token to report the status.
i could not tell what that token was telling me.
-
@sinned6915 said in Detachable Probes and Probing:
The error message that the system reports from the gcode meta command comes from the M401 file.
What error message? I didn't see an error message in your video.
Duet WiFi hardware designer and firmware engineer
Please do not ask me for Duet support via PM or email, use the forum
http://www.escher3d.com, https://miscsolutions.wordpress.com