Connecting stepper motor encoders to closed loop drivers
-
@v-a-m-p-printing-snproj said in Connecting stepper motor encoders to closed loop drivers:
Also my old drivers do not have a connection slot for the Alarm, Brake, or Com-
You can leave those disconnected.
Can you post a diagram showing how you intend to wire the STEP and DIRECTION connections?
-
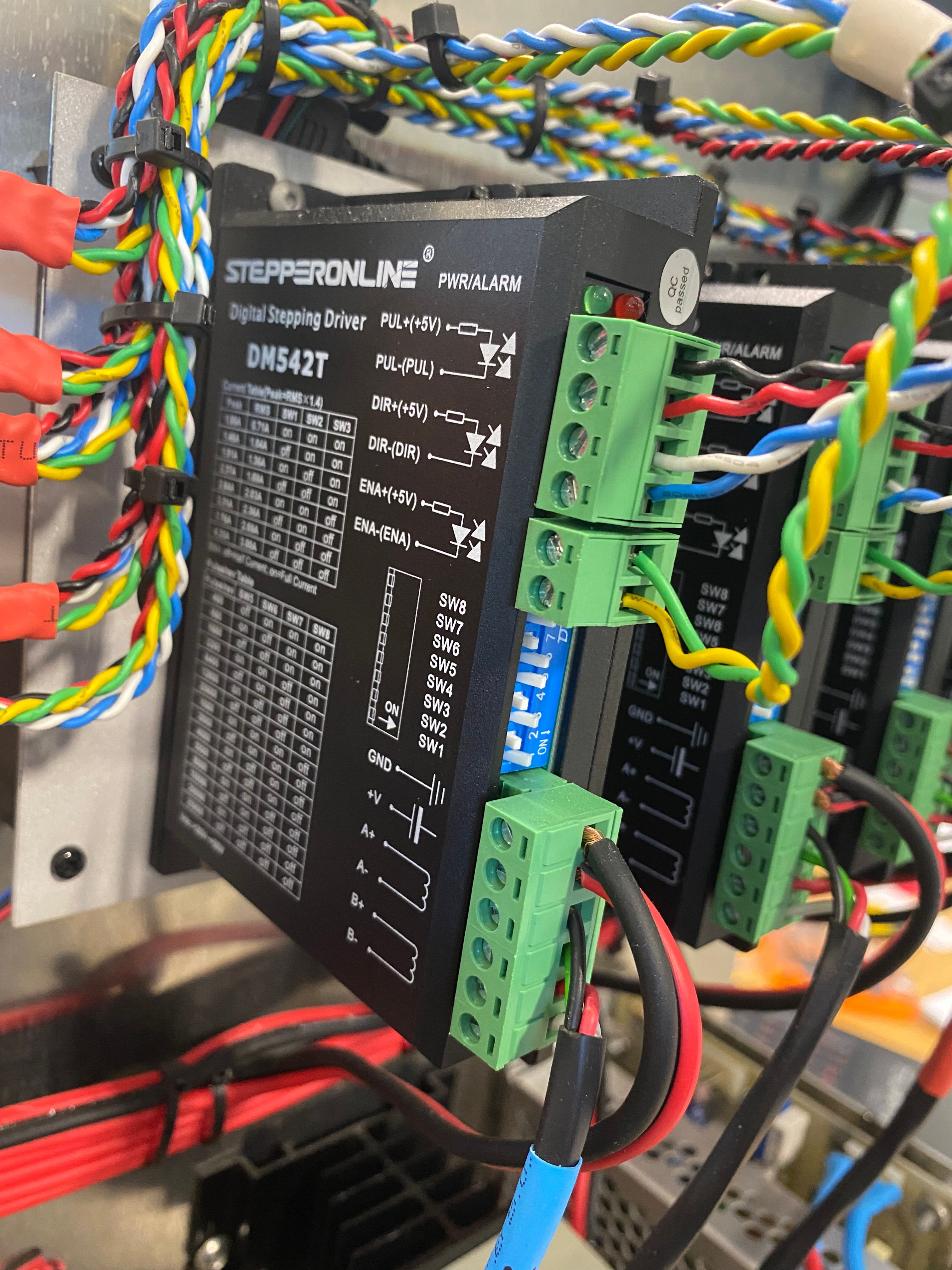
@alankilian  image url)
image url)This is my current driver set up. My plan was to connect the encoders and then connect everything from this driver to the new one.
-
@v-a-m-p-printing-snproj OK, I didn't know you had external drivers working already and were just moving to closed-loop drivers.
Let us know how they perform PLEASE!
-
@v-a-m-p-printing-snproj The alarm and Brake will just be outputs that you can use to monitor for an error in the drive (like out of position) or to apply an external brake. The com will be for those outputs.
in my setup I have the alarm status being monitored to stop my controller from tying to continue when one drive has stalled out.
-
Thanks for the help! Ill let you know how they are working. Also what is the connection signal on the duet 2 ethernet? I have the option of setting the drivers to either 5v or 12v.
-
@v-a-m-p-printing-snproj Use 5v setting.
The Duet's 3.3 Volt output might work and if not, you should get the expansion board as described HERE.
-
@alankilian I got it figured out I already have the expansion board. I got the new drivers all connected along with the encoders, but when I try and home the print head it shoots off in the wrong direction and requires me to emergency stop the printer. Any idea why this could be?
-
@v-a-m-p-printing-snproj Your direction signal is the wrong-way around.
In the M569 configuration change the "S" value to say the motor goes the other way.
-
ALSO, first get everything workong in OPEN-LOOP mode by setting SW6 CLOSED.
After you get everything moving in the right directions, you can change to closed-loop mode and see if your encoder is wired backwards.
-
@alankilian Where will I find SW6?
-
-
@alankilian Oh okay what do i want the rest of them to be set to?
-
@v-a-m-p-printing-snproj Set SW1-4 to how ever many pulses-per-rev you want.
What did you have your microstepping set to? 16x? with a 1.8-degree motor that would be 200 * 16 = 3200 steps-per-rev which is SE1-4 Off Off On On Or I bet you could see what your old driver was set to and copy that.
Oh HEY!!! SW5 changes the direction so you don't have to change the "S" setting in your configuration.
And SW6 should be ON to set open-loop control.
They are all described on the front of your driver.
-
@alankilian Okay I copied the settings from my other drivers already so ill changing the direction and see how it goes. Thanks!
-
Yes, I can read the switches on your old driver and it was set to 3200 steps-per-rev
Also set the rotary switch to 0 so when you start your closed-loop experiments it will be "weak". You can make it stronger once you get things working.
All the switches are described in the manual available HERE.
-
SW7 should be OFF to select step/direction mode.
-
@alankilian I got it moving in the right direction and it hits the x y limit switches but continues trying to drive through the x limit switch. What could be causing this?
-
Post your config.g, homex.g, homey.g homez.g homeall.g homedelta.g config-override.g and all that and we'll take a look. (You might not have all those files)
- Did you change the direction using the "S" parameter or did you change using the switch on the driver?
- Did your printer work well with the old drivers?
-
@alankilian I changed the direction with the switch on the driver and it printed alright, prints were sloppy. I ordered a new hot end so hopefully that helps with the sloppy prints when i get it moving right again.
-
@v-a-m-p-printing-snproj
Config .g
; Configuration file for Duet WiFi (firmware version 2.03)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.2.3 on Mon Mar 15 2021 15:55:39 GMT-0400 (Eastern Daylight Time); General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"VAMP" ; set printer name
M669 K1 ; select CoreXY mode; Network
M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet; Drives
M569 P3 S0 ; physical drive 3 goes forwards
M569 P5 S1 T2.5:2.5:5:5 ; physical drive 5 goes forwards
M569 P6 S1 T2.5:2.5:5:5 ; physical drive 6 goes forwards
M569 P7 S0 T2.5:2.5:5:5 ; physical drive 7 goes backwards
M569 P8 S0 T2.5:2.5:5:5 ; physical drive 8 goes backwards
M569 P9 S0 T2.5:2.5:5:5 ; physical drive 9 goes backwards
M584 X5 Y6 Z7:8:9 E3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.5234 Y79.6020 Z800.00 E95.00 ; set steps per mm
M566 X900.00 Y900.00 Z60.00 ; set maximum instantaneous speed changes (mm/min)
M203 X6000.00 Y6000.00 Z180.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z20.00 ; set accelerations (mm/s^2)
M906 E1600 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X415 Y415 Z440 S0 ; set axis maxima; Endstops
M574 X1 Y2 S1 ; set active high endstops
M574 Z1 S2 ; set endstops controlled by probe; Z-Probe
M307 H6 A-1 C-1 D-1 ; disable heater on PWM channel for BLTouch
M558 P9 H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X0 Y0 Z2.5 ; set Z probe trigger value, offset and trigger height
M557 X15:215 Y15:195 S20 ; define mesh grid; Heaters
M305 P0 T100000 B3950 R4700
M305 P1 T4700000 B5140 R4700 ; set thermistor + ADC parameters for heater 1
M143 H0 S180 ; set temperature limit for heater 0 to 100C
M143 H1 S490 ; set temperature limit for heater 1 to 490C; Fans
; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C; Custom settings are not defined
M501