Getting started with Closed Loop
-
@Adamfilip currently the options we support are:
-
Use external closed loop motors or motors+drivers with step/dir inputs and drive them from a Duet 3 MB6XD board (which may be rather expensive for your application and won't support your Z motors directly).
-
Use EXP1HCL expansion boards and motors with built-in encoders. The main board can be a Duet 3 Mini.
-
Use external closed loop motors or motors+drivers with step/dir inputs. If they can work with 3.3V signal levels than a Duet 3 Mini can drive two of them directly. The third can be driven from a EXP1XD expansion board.
We have another option coming in the near future:
- Use standard Nema 17 motors + magnetic encoder boards (coming soon!) + EXP1HCL expansion boards.
In the longer term we are looking to sell the motors with built-in CAN-connected closed loop drivers that we demonstrated at FormNext last November, although we will initially offer these in Nema 23, with Nema 17 coming later.
-
-
-
@Adamfilip the inductance of that motor is far too high for 3D printer use. Look for a motor with a much lower rated voltage, higher rated current, and low inductance. Use the calculator at https://www.reprapfirmware.org/emf.html to work out the speed at which motor torque will start to drop, and treat that as the maximum speed you will get in closed loop mode.
-
@dc42 said in Getting stared with Closed Loop:
- Use standard Nema 17 motors + magnetic encoder boards (coming soon!) + EXP1HCL expansion boards.
Waiting anxiously for this option. I have several diff magnet encoder/driver boards S42B, S42C, S57B, Servo42C. Ive gotten them to mostly work after decoding the uart protocols personally because there is no real support, they still kinda suck compared the cheapo optical encoder/drivers. The mags seem to oscillate if not tuned just right and tuning them is a nightmare w the nonexistent UIs to set them up correctly.
You can get and I do have a nema17 optical encoder/driver, but the physical size and cable management of it is way too much for small machines. I mostly use the optical encoder drivers on nema 23 and up.
For me the real benefit to using closed loop is for some of my custom machines that have heavy tool heads on the Z. Closed loop keeps the tools out of harms way while using much less energy without producing a lot of extra heat.
I have x2 1HCL boards just sitting in a box and would love to tinker w the Duets answer to magnetic encoding. Is there any documentation we can peruse as we wait for the hardware?
-
@dc42 I have a question
Is there a tested closed loop motor with encoder and magnetic brake, tested to work with DUET3 + HCL board -
undefined selva_tvi referenced this topic 9 Feb 2023, 06:40
-
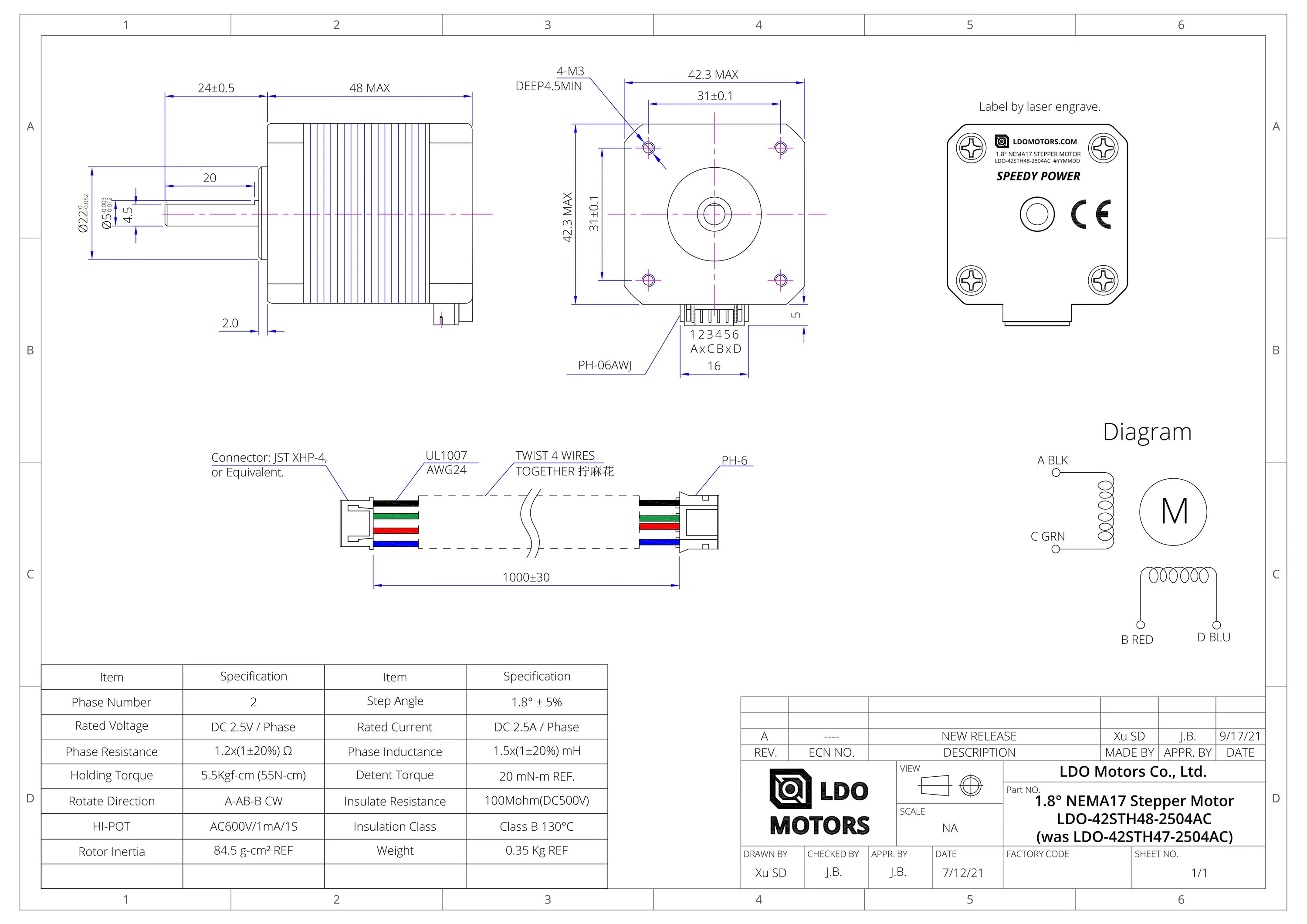
@dc42 how about this motor?
https://www.printedsolid.com/collections/motors/products/ldo-nema-17-42sth48-2504b-en1000
LDO
Spec SheetNEMA 17
1.8° Step Angle.
200 Steps Per Revolution.
2.5 Amp
5.5Ncm Holding Torque.
48mm Body. 20mm Encoder
22mm Output Shaft (5mm diameter) (15mm D-Shaped)
Closed Loop -
@Adamfilip said in Getting stared with Closed Loop:
@dc42 how about this motor?
https://www.printedsolid.com/collections/motors/products/ldo-nema-17-42sth48-2504b-en1000
LDO
Spec SheetNEMA 17
1.8° Step Angle.
200 Steps Per Revolution.
2.5 Amp
5.5Ncm Holding Torque.
48mm Body. 20mm Encoder
22mm Output Shaft (5mm diameter) (15mm D-Shaped)
Closed LoopI don't see inductance specified - have you been able to find a datasheet with that? Like @dc42 you need to be mindful of high inductance stepper motors - go as low as you can.
Take a peek at this motor, might be suitable for you!
https://www.omc-stepperonline.com/p-series-nema-17-closed-loop-stepper-motor-48ncm-67-99oz-in-with-encoder-1000ppr-4000cpr-17e1k-05Number of phase: 2
Step Angle: 1.8deg
Holding Torque: 48Ncm(67.99 oz.in)
Rated Current/phase: 2.0A
Phase Resistance: 1.35ohms
Inductance: 2.8mH ± 20%(1KHz) -
@sebkritikel said in Getting stared with Closed Loop:
I don't see inductance specified - have you been able to find a datasheet with that?
Here's some data for you.
Of COURSE, they don't show the specific motor suggested.

-
@alankilian Heh if I looked more carefully at the part number... the 42STH48-2504AC is a fairly popular motor with relatively low inductance, so the closed loop model is likely pretty darn close. Might work well.

-
Total noob here for Duet Boards. I have a Modix Big Meter which is basically a piece of crap. Im trying to get it more reliable and I would like to add closed loop stepper motors for the 4 z and 2 y and 1 x or vs versa on the x and y. I have the duet2 wifi and duet 5 expansion boards i just need to know what hardware to get and how to wire it up then change the config. any help on this would be much appreciated. I know electronics well just not familiar with duet boards and adding the closed loop motors. found these are they a good option. thank you