hi
I have a problem with my z axis on RRF3.4.0
i have 2 lead screw on left middle bed and right middle bed
Some time when i do a zhoming or G32 or G29 ,once lead screw (it will be the first or the second)don't stop or don't move correctly
G29 do a bad map because one lead screw don't move or have a bad move
configuration hardware
due3 6HC > 1xd(X can40)>1xd(Y1can41))>1xd(Y2can42))>1xd(Z1can43)>1xd(Z2can44)>distribution board>toolboard (E0 can23)>toolboard (E1 can22)>toolboard (E2 can21)>toolboard (E0 can20)
config.g
; configuration file for Duet 3 (firmware version 3)
;; General preferences
M111 S0 ;debugging off
G21 ;Work in mm
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"Duet3" ; set printer name
M669 K0 X1:0:0 Y0:1:0 Z0:0:1 ; select Cartesian mode
G4 S1 ;Wait for expansion boards to start
M555 S1 ;firmware mode 1-RRf 2-marlin
;Network
;M552 S1 ;enable network
;M586 P0 S1 ;enable http
;M586 P1 S0 ;disable ftp
;M586 P2 S0 ;disable Telnet
; Drives XYZ
M569 P40.0 S0 R0 T2.6:2.6:2.6:2.6 ; physical drive 40.0 goes forwards X MOONST T2.6:2.6:2.6:2.6 aa:bb:cc:dd Minimum driver step pulse width, step pulse interval, direction setup time and direction hold time, in microseconds
M569 P41.0 S0 R0 T2.6:2.6:2.6:2.6 ; physical drive 41.0 goes forwards Y1 MOONS
M569 P42.0 S0 R0 T2.6:2.6:2.6:2.6 ; physical drive 42.0 goes forwards Y2 MOONS
M569 P43.0 S0 R0 T2.6:2.6:5:5 ; physical drive 43.0 goes forwards Z1 BRAKE MOTOR T2.6:2.6:5:5; last T2.6:2.6:10:15
M569 P44.0 S0 R0 T2.6:2.6:5:5 ; physical drive 44.0 goes forwards Z2 BRAKE MOTOR
; Extruder
M569 P23.0 S1 ; TO0LBoard "T0" physical drive 23.0 goes forwards E1 toolboard
M569 P22.0 S1 ; TO0LBoard "T1" physical drive 22.0 goes forwards E1 toolboard
M569 P21.0 S1 ; TO0LBoard "T2" physical drive 21.0 goes forwards E1 toolboard
M569 P20.0 S1 ; TO0LBoard "T3" physical drive 20.0 goes forwards E1 toolboard
;Coupler ChangeTools
M569 P0.1 S1 ;Coupler ChangeTools axe C (duet 6hc)
M915 C S3 F0 H200 ;Stall detection coupler (endstop axe C)
;Drive Configuration
M584 X40.0 Y41.0:42.0 Z43.0:44.0 C0.1 E23.0:22.0:21.0:20.0 ; set drive mapping
M350 E16:16:16:16 I1 ; configure microstepping with interpolation M350 X16 Y16 Z16 E16:16 I1
M350 C8 I0
M92 X256 Y256 Z320 C100 E415:415:415:415 ; set steps per mm-
M566 X300 Y300 Z30 C2 E120:120:120:120 ; set maximum instantaneous speed changes (mm/min)-
M203 X10000 Y10000 Z300 C5000 E1200:1200:1200:1200 ; set maximum speeds (mm/min)-
M201 X400 Y400 Z100 C300 E250:250:250:250 ; set accelerations (mm/s^2)-
M906 C900 E1500:1500:1500:1500 I60 ; set motor currents (mA) and motor idle factor in per cent
M84 S60 ; Set idle timeout
; Axis Limits
M208 X0 Y-40 C0 S1 ; set axis minima/maxima Z0
M208 X830 Y800 Z400 C260 S0
;leadscrew
M671 X0:760 Y460:460 S5
; Endstops
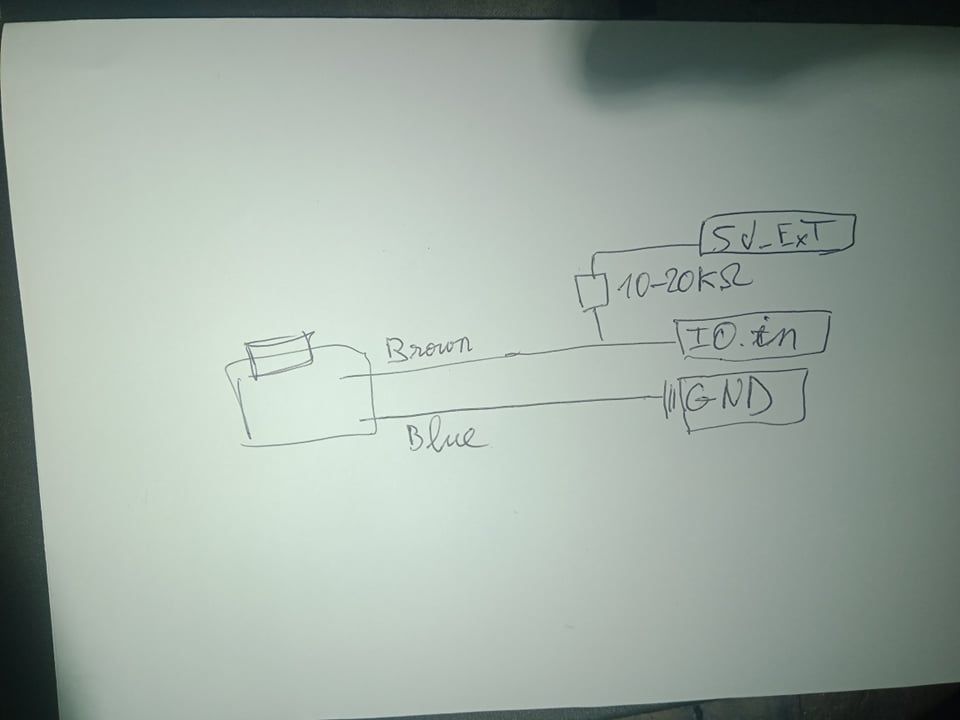
M574 X2 S1 P"io0.in" ; configure active-high endstop for low end on X via pin io0.in M574 X1 S1 P"!io0.in">capteur meca 3fils)
M574 Y1 S1 P"io1.in" ; configure active-high endstop for low end on Y via pin io1.in
M574 Z2 S2 ; configure active-high endstop for low end on Y via pin io1.in- M574 Z2 S2 zprobe-M574 Z1 S1 P"io2.in"
; Z-Probe switch
M558 K0 P5 C"^!io5.in" H5 F300 T8000 ; disable Z probe but set dive height, probe speed and travel speed1 -11sm244-T-M558 ONRON ou switch satndard- -irsensor M558 K0 P8 C"^io5.in" H5 F400 T6000
G31 K0 P1000 X0 Y60.2 Z0.3
M557 X100:700 Y100:700 P8 ; define mesh grid
;Z-Offset: If nozzle is too close to bed _reduce_ offset (negative number becomes more negative)
; If nozzle is too far away, _increase_ offset (negative number becomes less negative)
;TOOLCHANGE Zprobe offset
M558 K1 P8 C"^io3.in" H5 F100 L0 T4000
G31 K1 P1000 x820 Y430 Z0
;DOCK switch for toolchange parking verification
M950 J1 C"23.io0.in" ;Gpin4 = Tool 0 Dock switch (on Toolboard 23);Gpin 1= T0 dock switch on 6hc
M950 J2 C"22.io0.in" ;Gpin3 = Tool 1 Dock switch (on Toolboard 22);Gpin 2= T1 dock switch on 6hc
M950 J3 C"21.io0.in" ;Gpin2 = Tool 2 Dock switch (on Toolboard 21);Gpin 3= T2 dock switch on 6hc
M950 J4 C"20.io0.in" ;Gpin1 = Tool 3 Dock switch (on Toolboard 20);Gpin 4= T3 dock switch on 6hc
;ALARMS for STEPPER DRIVER Moons RS06-P-A
;X axis fail (CAN40)
M950 P5 C"40.io1.in" ;Create a Pin number 10 on XD Board (CAM 40)for servo alarm.the alarm is active low so invert the input and enable the pullup to prevent spurious alarm caused by noise
M950 J6 C"40.io2.out" ;Create a Gpio Pin Number 11 on 1XD(CAM40) for alarm reset
M581 P5 T5 S1 R0 ;Invoke trigger 5 when a active to inactive edge is dectected on imput 5 and to trigger at any time
;Y1 axis fail
M950 P7 C"41.io1.in" ;Create a Pin number 12 on XD Board (CAM 41)for servo alarm.the alarm is active low so invert the input and enable the pullup to prevent spurious alarm caused by noise
M950 J8 C"41.io2.out" ;Create a Gpio Pin Number 13 on 1XD(CAM41) for alarm reset
M581 P7 T6 S0 R0 ;Invoke trigger 6 when a active to inactive edge is dectected on imput 7 and to trigger at any time
;Y2 axis fail
M950 P9 C"42.io1.in" ;Create a Pin number 14 on XD Board (CAM 42)for servo alarm.the alarm is active low so invert the input and enable the pullup to prevent spurious alarm caused by noise
M950 J10 C"42.io2.out" ;Create a Gpio Pin Number 15 on 1XD(CAM42) for alarm reset
M581 P9 T7 S0 R0 ;Invoke trigger 7 when a active to inactive edge is dectected on imput 9 and to trigger at any time
; HEATERS
;BED
M308 S0 P"temp0" Y"thermistor" T100000 B3950 ; configure sensor 0 as thermistor on pin temp0
M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0
M140 H0 ; map heated bed to heater 0
M143 H0 S180 ; set temperature limit for heater 0 to 180C
M307 H0 A188.2 C3722.6 D17.2 S1.00 V24.2 B0 ; enable bang-bang mode for the bed heater and set PWM limit M307 H0 A188.2 C3722.6 D17.2 S1.00 V24.2 B0
;Extruder 0 (T0) CANbus 23
M308 S1 P"23.temp0" Y"pt1000" ; configure sensor 2 as thermistor on pin 23.temp0
M950 H1 C"23.out0" T1 ; create nozzle heater output on 23.out0 and map it to sensor 2
M143 H1 S340 ; set temperature limit for heater 2 to 290C
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
;Extruder 1 (T1) CANbus 22
M308 S2 P"22.temp0" Y"thermistor" T100000 B4138 ; configure sensor 2 as thermistor on pin 22.temp0
M950 H2 C"22.out0" T2 ; create nozzle heater output on 22.out0 and map it to sensor 2
M143 H2 S300 ; set temperature limit for heater 2 to 290C
M307 H2 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
;Extruder 2 (T2) CANbus 21
M308 S3 P"21.temp0" Y"thermistor" T100000 B4138 ; configure sensor 2 as thermistor on pin 21.temp0
M950 H3 C"21.out0" T3 ; create nozzle heater output on 21.out0 and map it to sensor 2
M143 H3 S300 ; set temperature limit for heater 2 to 290C
M307 H3 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
;Extruder 3 (T3) CANbus 20
M308 S4 P"20.temp0" Y"thermistor" T100000 B4138 ; configure sensor 2 as thermistor on pin 20.temp0
M950 H4 C"20.out0" T4 ; create nozzle heater output on 20.out0 and map it to sensor 2
M143 H4 S300 ; set temperature limit for heater 1 to 290C
M307 H4 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
; FANS
;T0 fan
M950 F0 C"23.out1" Q500 ; T0-part cooling fan
M106 P0 C"T0 partcooling fan" S0 B0.1 H-1 ; Default off.bootstart for 0.1s (B0.1);thermostatic control off
M950 F1 C"23.out2" Q500 ; T0-Hotend cooling fan
M106 P1 C"T0 hotend fan" S1 H1 T40 ; Default ON. Thermostatic control above 40°C
;T1 fan
M950 F2 C"22.out1" Q500 ; T1-part cooling fan
M106 P2 C"T1 partcooling fan" S0 B0.1 H-1 ; Default off.bootstart for 0.1s (B0.1);thermostatic control off
M950 F3 C"22.out2" Q500 ; T1-Hotend cooling fan
M106 P3 C"T1 hotend fan" S1 H1 T40 ; Default ON. Thermostatic control above 40°C
;T2 fan
M950 F4 C"21.out1" Q500 ; T2-part cooling fan
M106 P4 C"T2 partcooling fan" S0 B0.1 H-1 ; Default off.bootstart for 0.1s (B0.1);thermostatic control off
M950 F5 C"21.out2" Q500 ; T2-Hotend cooling fan
M106 P5 C"T2 hotend fan" S1 H1 T40 ; Default ON. Thermostatic control above 40°C
;T3 fan
M950 F6 C"20.out1" Q500 ; T3-part cooling fan
M106 P6 C"T3 partcooling fan"S0 B0.1 H-1 ; Default off.bootstart for 0.1s (B0.1);thermostatic control off
M950 F7 C"20.out2" Q500 ; T3-Hotend cooling fan
M106 P7 C"T3 hotend fan"S1 H1 T40 ; Default ON. Thermostatic control above 40°C
; TOOLS
;T0
M563 S"T0" P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C
;T1
M563 S"T1" P1 D1 H2 F2 ; define tool 1
G10 P1 X0 Y0 Z0 ; set tool 1 axis offsets
G10 P1 R0 S0 ; set initial tool 1 active and standby temperatures to 0C
;T2
M563 S"T2" P2 D2 H3 F4 ; define tool 2
G10 P2 X0 Y0 Z0 ; set tool 2 axis offsets
G10 P2 R0 S0 ; set initial tool 1 active and standby temperatures to 0C
;T3
M563 S"T3" P3 D3 H4 F6 ; define tool 3
G10 P3 X0 Y0 Z0 ; set tool 3 axis offsets
G10 P3 R0 S0 ; set initial tool 1 active and standby temperatures to 0C
;TOOLS OFFSET
; estimed offset for :
; Copperhead-tool >>> Z-74.6
G10 P0 X0 Y70 Z-62 ;TO Z-60.4
G10 P1 X0 Y70 Z-62 ;T1
G10 P2 X0 Y70 Z-62 ;T2
G10 P3 X0 Y70 Z-62 ;T3
; Custom settings are not defined
; cancel ringing at 50Hz
;M593 F45
; deselect Tools
T-1
;Filament sensor type "switch"
M591 D0 P2 C"23.io1.in" S1 ; filament monitor connected to E0 endstop for T0
; Miscellaneous
M575 P1 S1 B57600 ; enable support for PanelDue
M501 ; load saved parameters from non-volatile memory
M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss
M122
m122
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.4.0 (2022-03-15 18:57:24) running on Duet 3 MB6HC v1.01 or later (SBC mode)
Board ID: 08DJM-956BA-NA3TJ-6JTDA-3SD6P-9A96T
Used output buffers: 1 of 40 (21 max)
=== RTOS ===
Static ram: 151000
Dynamic ram: 67864 of which 208 recycled
Never used RAM 131456, free system stack 158 words
Tasks: SBC(ready,0.6%,436) HEAT(notifyWait,0.0%,321) Move(notifyWait,0.0%,258) CanReceiv(notifyWait,0.1%,772) CanSender(notifyWait,0.0%,356) CanClock(delaying,0.0%,339) TMC(notifyWait,7.9%,92) MAIN(running,91.3%,923) IDLE(ready,0.1%,30), total 100.0%
Owned mutexes: HTTP(MAIN)
=== Platform ===
Last reset 00:39:22 ago, cause: software
Last software reset at 2022-03-29 11:50, reason: User, GCodes spinning, available RAM 131596, slot 0
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task SBC Freestk 0 n/a
Error status: 0x00
Aux0 errors 0,0,0
Step timer max interval 135
MCU temperature: min 39.8, current 40.4, max 40.5
Supply voltage: min 24.0, current 24.0, max 24.1, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.0, current 12.1, max 12.1, under voltage events: 0
Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0
Events: 0 queued, 0 completed
Driver 0: standstill, SG min n/a, mspos 8, reads 4100, writes 0 timeouts 0
Driver 1: standstill, SG min n/a, mspos 528, reads 4100, writes 0 timeouts 0
Driver 2: standstill, SG min n/a, mspos 8, reads 4100, writes 0 timeouts 0
Driver 3: standstill, SG min n/a, mspos 8, reads 4099, writes 0 timeouts 0
Driver 4: standstill, SG min n/a, mspos 8, reads 4099, writes 0 timeouts 0
Driver 5: standstill, SG min n/a, mspos 8, reads 4099, writes 0 timeouts 0
Date/time: 2022-03-29 12:30:19
Slowest loop: 321.91ms; fastest: 0.03ms
=== Storage ===
Free file entries: 10
SD card 0 not detected, interface speed: 37.5MBytes/sec
SD card longest read time 0.0ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 125, segments created 6, maxWait 996922ms, bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 206, completed 206, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 2], CDDA state -1
=== AuxDDARing ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP* is doing "M122" in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger* is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty
=== Filament sensors ===
Extruder 0 sensor: ok
=== CAN ===
Messages queued 11234, received 74543, lost 0, boc 62
Longest wait 3ms for reply type 6013, peak Tx sync delay 3834, free buffers 50 (min 44), ts 6161/6130/0
Tx timeouts 0,0,0,0,0,0
=== SBC interface ===
Transfer state: 4, failed transfers: 0, checksum errors: 0
RX/TX seq numbers: 24989/24989
SPI underruns 0, overruns 0
State: 5, disconnects: 0, timeouts: 0, IAP RAM available 0x2b880
Buffer RX/TX: 0/0-0, open files: 0
=== Duet Control Server ===
Duet Control Server v3.4.0
Code buffer space: 4096
Configured SPI speed: 8000000Hz, TfrRdy pin glitches: 0
Full transfers per second: 39.36, max time between full transfers: 56.6ms, max pin wait times: 49.0ms/3.8ms
Codes per second: 0.04
Maximum length of RX/TX data transfers: 4326/1088
Z1
m122 b43
Diagnostics for board 43:
Duet EXP1XD firmware version 3.4.0 (2022-03-15 08:59:26)
Bootloader ID: SAMC21 bootloader version 2.3 (2021-01-26b1)
All averaging filters OK
Never used RAM 5556, free system stack 43 words
Tasks: Move(notifyWait,0.0%,111) HEAT(notifyWait,0.1%,115) CanAsync(notifyWait,0.0%,64) CanRecv(notifyWait,0.0%,75) CanClock(notifyWait,0.0%,64) MAIN(running,96.4%,443) IDLE(ready,0.0%,40) AIN(notifyWait,3.5%,142), total 100.0%
Last reset 00:40:34 ago, cause: software
Last software reset data not available
Driver 0: pos -903992, 320.0 steps/mm, steps req 359259 done 58584
Moves scheduled 151, completed 151, in progress 0, hiccups 0, step errors 0, maxPrep 450, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0
Peak sync jitter 1/19, peak Rx sync delay 205, resyncs 0/0, no step interrupt scheduled
VIN voltage: min 24.4, current 24.4, max 24.5
MCU temperature: min 20.5C, current 20.9C, max 21.0C
Last sensors broadcast 0x00000000 found 0 82 ticks ago, 0 ordering errs, loop time 0
CAN messages queued 11006, send timeouts 0, received 17782, lost 0, free buffers 37, min 37, error reg ff7800
dup 0, oos 2/0/0/0, bm 0, wbm 0, rxMotionDelay 317, adv 35442/36893
29/03/2022, 12:30:22
Z2
m122 b44
Diagnostics for board 44:
Duet EXP1XD firmware version 3.4.0 (2022-03-15 08:59:26)
Bootloader ID: SAMC21 bootloader version 2.3 (2021-01-26b1)
All averaging filters OK
Never used RAM 5556, free system stack 43 words
Tasks: Move(notifyWait,0.0%,111) HEAT(notifyWait,0.1%,115) CanAsync(notifyWait,0.0%,64) CanRecv(notifyWait,0.0%,75) CanClock(notifyWait,0.0%,64) MAIN(running,96.4%,447) IDLE(ready,0.0%,40) AIN(delaying,3.5%,142), total 100.0%
Last reset 00:42:48 ago, cause: software
Last software reset data not available
Driver 0: pos -902844, 320.0 steps/mm, steps req 1075406 done 170845
Moves scheduled 152, completed 152, in progress 0, hiccups 0, step errors 0, maxPrep 449, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0
Peak sync jitter 0/15, peak Rx sync delay 205, resyncs 0/0, no step interrupt scheduled
VIN voltage: min 24.3, current 24.3, max 24.4
MCU temperature: min 23.0C, current 23.3C, max 23.5C
Last sensors broadcast 0x00000000 found 0 67 ticks ago, 0 ordering errs, loop time 0
CAN messages queued 20576, send timeouts 0, received 33135, lost 0, free buffers 37, min 37, error reg ff7d00
dup 0, oos 1/0/0/0, bm 0, wbm 0, rxMotionDelay 312, adv 31226/37178
thanks a lot I am little bit disappointing
") it' solved with manualy update firware (copy past firmware on sd card )
it' solved with manualy update firware (copy past firmware on sd card )")