Hello again,
thank you so much, we just follow all the steps and WIFI is working again.
Thanks ")
Hello again,
thank you so much, we just follow all the steps and WIFI is working again.
Thanks
Hello,
we bought in E3D-Online a Duet 3 Mainboard 6HC and WIFI stops working after a few months, started to lost the configuration of wifi and now we can't make it work anyway.
It's updated to the latest firmware and we can't make wifi works, see photo.
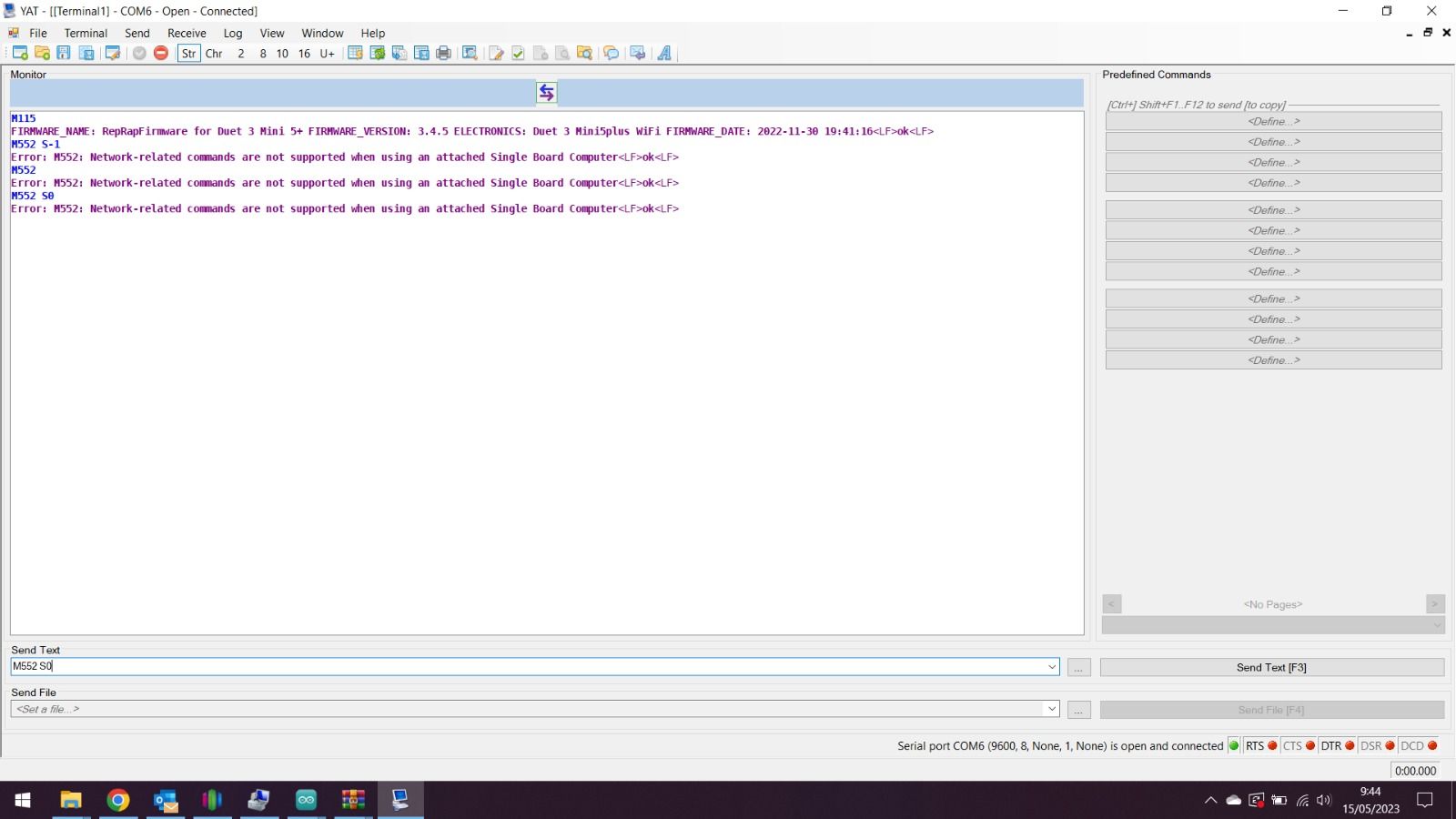
Anny suggestions?
Thanks
@phaedrux no, still on 3.3.
I don't know if I upgrade to beta if I can fix one thing and break a couple more...
@phaedrux I test this morning and it's very strange.
If I use M600 and send the GCODE, the machine pause, and then I can use the resume button and works fine.
But if I use the Pause button always fails...
any ideas?
@phaedrux any ideas? reading other issues of this error I think it's for the M350 and M906 that define X and Y motors that are with the external boards and drivers, but that can cause the problem of the resume?
Is this a known error in 3.3 version? that's why you're suggesting trying 3.4 beta?
@phaedrux I get this error:
Error: Setting not available for external drivers
Setting not available for external drivers
Warning: Heater 0 appears to be over-powered. If left on at full power, its temperature is predicted to reach 365C
@phaedrux
I have to finish some work in the machine and don't think can try new firmware on beta until 9th of December at least...
About my files, they are on my previous replys to @T3P3Tony all of them, config, pause and the new resume I updated after see the one that was wrong.
Now it seems to be failing all times I try to resume, any ideas?
@t3p3tony I try and first was try and error, here the M122 results
M122
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.3 (2021-06-15 21:45:47) running on Duet 3 MB6HC v1.01 or later (standalone mode)
Board ID: 08DJM-9P63L-DJ3S0-7JTD4-3S86P-9AJM9
Used output buffers: 1 of 40 (22 max)
=== RTOS ===
Static ram: 150904
Dynamic ram: 92144 of which 0 recycled
Never used RAM 108288, free system stack 142 words
Tasks: NETWORK(ready,47.1%,224) ETHERNET(notifyWait,7.2%,117) HEAT(delaying,1.4%,325) Move(notifyWait,12.5%,247) CanReceiv(notifyWait,1.6%,774) CanSender(notifyWait,1.0%,362) CanClock(delaying,0.7%,339) TMC(notifyWait,132.8%,59) MAIN(running,49.8%,1092) IDLE(ready,0.0%,29), total 254.3%
Owned mutexes:
=== Platform ===
Last reset 117:09:14 ago, cause: power up
Last software reset details not available
Error status: 0x10
Aux0 errors 0,0,31
Step timer max interval 159
MCU temperature: min 35.3, current 45.4, max 48.9
Supply voltage: min 23.3, current 23.7, max 24.0, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.1, current 12.2, max 12.3, under voltage events: 0
Heap OK, handles allocated/used 99/1, heap memory allocated/used/recyclable 2048/180/168, gc cycles 0
Driver 0: position 57128, standstill, reads 34586, writes 11 timeouts 0, SG min/max 0/0
Driver 1: position 19315, standstill, reads 34520, writes 77 timeouts 0, SG min/max 0/516
Driver 2: position 4736, standstill, reads 34520, writes 77 timeouts 0, SG min/max 0/537
Driver 3: position 0, standstill, reads 34587, writes 11 timeouts 0, SG min/max 0/0
Driver 4: position 0, standstill, reads 34521, writes 77 timeouts 0, SG min/max 0/544
Driver 5: position 0, standstill, reads 34521, writes 77 timeouts 0, SG min/max 0/528
Date/time: 2021-11-24 17:02:06
Slowest loop: 244.06ms; fastest: 0.03ms
=== Storage ===
Free file entries: 9
SD card 0 detected, interface speed: 25.0MBytes/sec
SD card longest read time 1.1ms, write time 799.9ms, max retries 0
=== Move ===
DMs created 125, maxWait 26493523ms, bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 5107, completed moves 5103, hiccups 0, stepErrors 0, LaErrors 0, Underruns [143, 23, 33], CDDA state 3
=== AuxDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters = 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamberHeaters = -1 -1 -1 -1
Heater 0 is on, I-accum = 0.0
Heater 1 is on, I-accum = 0.0
=== GCodes ===
Segments left: 1
Movement lock held by null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is doing "G1 X506.026 Y244.066 E49.3093" in state(s) 0
USB is idle in state(s) 0
Aux is assembling a command in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== Filament sensors ===
Extruder 0 sensor: no filament
=== CAN ===
Messages queued 12407519, received 5272477, lost 0, longest wait 1ms for reply type 6042, peak Tx sync delay 699, free buffers 49 (min 17), ts 2108775/2108774/0
Tx timeouts 0,0,0,0,0,0
=== Network ===
Slowest loop: 800.86ms; fastest: 0.02ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions Telnet(0), 0 sessions
HTTP sessions: 1 of 8
- Ethernet -
State: active
Error counts: 0 0 1 0 0
Socket states: 5 2 2 2 2 0 0 0
M122 40
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.3 (2021-06-15 21:45:47) running on Duet 3 MB6HC v1.01 or later (standalone mode)
Board ID: 08DJM-9P63L-DJ3S0-7JTD4-3S86P-9AJM9
Used output buffers: 1 of 40 (25 max)
=== RTOS ===
Static ram: 150904
Dynamic ram: 92144 of which 0 recycled
Never used RAM 108288, free system stack 142 words
Tasks: NETWORK(ready,28.5%,224) ETHERNET(notifyWait,0.1%,117) HEAT(delaying,0.0%,325) Move(notifyWait,0.1%,247) CanReceiv(notifyWait,0.0%,774) CanSender(notifyWait,0.0%,362) CanClock(delaying,0.0%,339) TMC(notifyWait,8.0%,59) MAIN(running,63.3%,1092) IDLE(ready,0.0%,29), total 100.0%
Owned mutexes: HTTP(MAIN)
=== Platform ===
Last reset 117:10:02 ago, cause: power up
Last software reset details not available
Error status: 0x10
Aux0 errors 0,0,0
Step timer max interval 129
MCU temperature: min 45.0, current 45.2, max 45.5
Supply voltage: min 23.5, current 23.7, max 23.8, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.1, current 12.1, max 12.2, under voltage events: 0
Heap OK, handles allocated/used 99/1, heap memory allocated/used/recyclable 2048/180/168, gc cycles 0
Driver 0: position 58154, standstill, reads 3028, writes 0 timeouts 0, SG min/max not available
Driver 1: position 19467, standstill, reads 3028, writes 0 timeouts 0, SG min/max 0/501
Driver 2: position 4736, standstill, reads 3027, writes 0 timeouts 0, SG min/max 0/512
Driver 3: position 0, standstill, reads 3027, writes 0 timeouts 0, SG min/max not available
Driver 4: position 0, standstill, reads 3027, writes 0 timeouts 0, SG min/max 0/526
Driver 5: position 0, standstill, reads 3027, writes 0 timeouts 0, SG min/max 0/511
Date/time: 2021-11-24 17:02:54
Slowest loop: 3.09ms; fastest: 0.05ms
=== Storage ===
Free file entries: 9
SD card 0 detected, interface speed: 25.0MBytes/sec
SD card longest read time 1.0ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 125, maxWait 0ms, bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 5355, completed moves 5341, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state 3
=== AuxDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters = 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamberHeaters = -1 -1 -1 -1
Heater 0 is on, I-accum = 0.0
Heater 1 is on, I-accum = 0.0
=== GCodes ===
Segments left: 1
Movement lock held by null
HTTP is ready with "M122 40" in state(s) 0
Telnet is idle in state(s) 0
File is doing "G1 X415.098 Y205.787 E0.4560 F4800" in state(s) 0
USB is idle in state(s) 0
Aux is assembling a command in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== Filament sensors ===
Extruder 0 sensor: no filament
=== CAN ===
Messages queued 1118, received 603, lost 0, longest wait 0ms for reply type 0, peak Tx sync delay 127, free buffers 49 (min 40), ts 240/240/0
Tx timeouts 0,0,0,0,0,0
=== Network ===
Slowest loop: 3.44ms; fastest: 0.02ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions Telnet(0), 0 sessions
HTTP sessions: 1 of 8
- Ethernet -
State: active
Error counts: 0 0 1 0 0
Socket states: 5 2 2 2 2 0 0 0
M122 41
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.3 (2021-06-15 21:45:47) running on Duet 3 MB6HC v1.01 or later (standalone mode)
Board ID: 08DJM-9P63L-DJ3S0-7JTD4-3S86P-9AJM9
Used output buffers: 1 of 40 (25 max)
=== RTOS ===
Static ram: 150904
Dynamic ram: 92144 of which 0 recycled
Never used RAM 108288, free system stack 142 words
Tasks: NETWORK(ready,28.4%,224) ETHERNET(notifyWait,0.1%,117) HEAT(delaying,0.0%,325) Move(notifyWait,0.1%,247) CanReceiv(notifyWait,0.0%,774) CanSender(notifyWait,0.0%,362) CanClock(delaying,0.0%,339) TMC(notifyWait,8.1%,59) MAIN(running,63.2%,1092) IDLE(ready,0.0%,29), total 100.0%
Owned mutexes: HTTP(MAIN)
=== Platform ===
Last reset 117:10:07 ago, cause: power up
Last software reset details not available
Error status: 0x10
Aux0 errors 0,0,0
Step timer max interval 125
MCU temperature: min 44.9, current 45.0, max 45.2
Supply voltage: min 23.4, current 23.7, max 23.8, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.1, current 12.1, max 12.2, under voltage events: 0
Heap OK, handles allocated/used 99/1, heap memory allocated/used/recyclable 2048/180/168, gc cycles 0
Driver 0: position 60177, standstill, reads 25223, writes 0 timeouts 0, SG min/max not available
Driver 1: position 18579, standstill, reads 25223, writes 0 timeouts 0, SG min/max 0/496
Driver 2: position 4736, standstill, reads 25223, writes 0 timeouts 0, SG min/max 0/506
Driver 3: position 0, standstill, reads 25223, writes 0 timeouts 0, SG min/max not available
Driver 4: position 0, standstill, reads 25223, writes 0 timeouts 0, SG min/max 0/513
Driver 5: position 0, standstill, reads 25223, writes 0 timeouts 0, SG min/max 0/506
Date/time: 2021-11-24 17:02:59
Slowest loop: 0.48ms; fastest: 0.05ms
=== Storage ===
Free file entries: 9
SD card 0 detected, interface speed: 25.0MBytes/sec
SD card longest read time 0.4ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 125, maxWait 0ms, bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 5374, completed moves 5366, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state 3
=== AuxDDARing ===
Scheduled moves 0, completed moves 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters = 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamberHeaters = -1 -1 -1 -1
Heater 0 is on, I-accum = 0.0
Heater 1 is on, I-accum = 0.0
=== GCodes ===
Segments left: 1
Movement lock held by null
HTTP is ready with "M122 41" in state(s) 0
Telnet is idle in state(s) 0
File is doing "G1 X415.097 Y237.788 E2.3978" in state(s) 0
USB is idle in state(s) 0
Aux is assembling a command in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty.
=== Filament sensors ===
Extruder 0 sensor: no filament
=== CAN ===
Messages queued 99, received 56, lost 0, longest wait 0ms for reply type 0, peak Tx sync delay 5, free buffers 49 (min 44), ts 23/23/0
Tx timeouts 0,0,0,0,0,0
=== Network ===
Slowest loop: 2.43ms; fastest: 0.02ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions Telnet(0), 0 sessions
HTTP sessions: 1 of 8
- Ethernet -
State: active
Error counts: 0 0 1 0 0
Socket states: 5 2 2 2 2 0 0 0
This one should work?
; resume.g
; called before a print from SD card is resumed
;
; generated by RepRapFirmware Configuration Tool v3.3.5 on Tue Nov 23 2021 11:54:18 GMT+0100 (hora estándar de Europa central)
G1 R1 X0 Y0 Z5 F6000 ; go to 5mm above position of the last print move
G1 R1 X0 Y0 Z0 ; go back to the last print move
M83 ; relative extruder moves
G1 E10 F3600 ; extrude 10mm of filament
@t3p3tony hello, my files:
; Network
M552 P0.0.0.0 S1 ; enable network and acquire dynamic address via DHCP
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet
; Drives
M584 X40.0 Y41.0 Z1:2:4:5 E20.0 ; J- configuramos los motores X, Y, Z y E en cada posición de la placa principal o placas externas.
M671 X1115:1115:-15:-15 Y1360:-260:-260:1360 S0.5 ; J- configuramos la posición de los husillos respecto el origen (0,0) de la cama (no de los finales de carrera)
;M584 X40.0 ; set X driver
;M584 Y41.0 ; set Y driver
;M584 Z1:2:4:5 ; set Z driver
;M584 E20.0 ; set E driver
M569 P0 S0 ; physical drive 0.0 goes forwards
M569 P1 S0 ; physical drive 0.1 goes forwards
M569 P2 S0 ; physical drive 0.2 goes forwards
M569 P3 S0 ; physical drive 0.3 goes forwards
M569 P4 S0 ; physical drive 0.4 goes forwards
M569 P5 S0 ; physical drive 0.5 goes forwards
G4 S1 ;wait for expansion boards to start
M569 P40.0 S1 R0 ;T2.7 EJE X ; change enable polarity, active = disable drive
M569 P41.0 S1 R0 ;T2.7 EJE Y
M569 P20.0 S1
; set drive mapping
M350 X16 Y16 Z32 E16 I1 ; configure microstepping with interpolation
M92 X133.333 Y133.333 Z1280 E420.00 ; set steps per mm
M566 X900.00 Y900.00 Z12 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X10000.00 Y10000.00 Z500 E1200.00 ; set maximum speeds (mm/min)
M201 X500.00 Y500.00 Z100.00 E250.00 ; set accelerations (mm/s^2)
M906 X1000 Y1000 Z2800 E800 I30 ; set motor currents (mA) and motor idle factor in per cent
G21 ; TRABAJO EN MM
G90 ; TRABAJO EN CORDENADAS ABSOLUTAS
M84 S30 ; Set idle timeout
; Axis Limits
M208 X-50 Y-24 Z0 S1 ; set axis minima
M208 X1100 Y1100 Z1000 S0 ; set axis maxima
; Endstops
M574 X1 S1 P"io0.in" ; configure active-high endstop for low end on X via pin io0.in
M574 Y1 S1 P"io1.in" ; configure active-high endstop for low end on Y via pin io1.in
M574 Z1 S1 P"io3.in+io4.in+io5.in+io6.in" ; configuramos finales de carrera eje Z según orden de motores
; Z-Probe
M950 S0 C"20.io0.out" ; create servo pin 0 for BLTouch
M558 P9 C"^20.io0.in" H10 F120 H200 T6000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X-20 Y40 Z1.2 ; set Z probe trigger value, offset and trigger height
;M557 X50:1040 Y40:1000 S500 ; define mesh grid
; Heaters
M308 S1 P"temp3" Y"thermistor" T100000 B4725 C7.06e-8 R2200 ; configure sensor 1 as thermistor on pin temp0
M950 H0 C"out0" T1 ; create bed heater output on out0 and map it to sensor 1
M307 H0 A340 C2745.9 D25 S1.00 B0
;M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S0 P"20.temp0" Y"thermistor" B4725 C7.06e-8 ; configure sensor 0 as thermistor on pin temp1
M950 H1 C"20.out0" T0 ; create nozzle heater output on out1 and map it to sensor 0
M307 H0 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H0 S120 ; set temperature limit for heater 0 to 120C
; Fans
M950 F0 C"20.out1" Q500 ; create fan 0 on pin out7 and set its frequency
M950 F1 C"20.out2" Q500
M106 P0 S255 H0 T50
M106 P0 S0; Herramienta 2 PCF
; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C
M591 D0 P1 C"20.io1.in" S2 ; filament monitor connected to E0_stop
;M591 D0
; Custom settings are not defined
;M556 S100 X0 Y0 Z0 ; Put your axis compensation here
;M912 P9 S0 ; Put your CPU temperature sensor correction here
;M501 ; Run config-override.g
;T0 ; Select the first head
; Miscellaneous
M575 P1 S1 B57600 ; enable support for PanelDue
M564 H0
M302 P1
; pause.g
; called when a print from SD card is paused
;
; generated by RepRapFirmware Configuration Tool v3.1.4 on Mon Aug 31 2020 15:45:57 GMT+0800 (中国标准时间)
M83 ; relative extruder moves
G1 E-10 F3600 ; retract 10mm of filament
G91 ; relative positioning
G1 Z5 F360 ; lift Z by 5mm
G90 ; absolute positioning
G1 X0 Y0 F6000 ; go to X=0 Y=0
USUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUSUS
Wow, I didn't notice until now that resume.g has this code inside, why is that? I didn't change it and it was working before
At the moment I have to print some pieces and can't test pause-resume until a few days, but I'll put something if I get the error again
Hello,
I'm running with Duet 3 6HC, all Z motors (4) to the Duet mainboard and X and Y motors to external expansion boards.
My problem is that like 90% of times, I can Pause, change filament and then resume and no problems at all, but 10% times when I resume printer doesn't keep the right coordinates and start printing somewhere else...
Any ideas what is happening those times that fails?
Thanks
@stephen6309 I've just discovered the problem.
In Simplify 3D I have in Gcode z offset in -1, so the Web panel starts in 0 but for gcode is really in -1, so first layer was 105% layer height of 0.6mm, thats 0,63mm, and second layer 0,6 more, thats 1,23mm, minus 1 because of the negative offset is the 0,23 that webpanel was showing me...
Hello!
I'm having problems with my machine.
When I print, if layer height is 0,6mm the printer goes to 0,23mm in first layer. I check it in Web Control Panel and I really don't know why is happening that.
On first tests I think it was working ok, and the only difference is that I use the mesh grid and now I load the mesh before printing (G29 S1)
Any ideas?
I
@oliof yes, I have two extension boards, those motors and endstops are working fine, they have their own external control drivers.
@jay_s_uk yes, lights are working ok, now I have a differente situation I'm going to explain.
I put a backup of the config files before using 4 endstops for Z axis and only the probe for Z that was working fine, so machine was working good. Then I updated only the config.g with the one defined with 4 endstops and still good... all motors of Z moving and homming with the probe...
When I put the latest homez.g file the problem was again in the machine, so I made this change:
This is the homez.g with the initial problems
; homez.g
; called to home the Z axis
;
; generated by RepRapFirmware Configuration Tool v3.1.4 on Fri Sep 04 2020 14:49:01 GMT+0800 (中国标准时间)
G91 ; relative positioning
G1 H2 Z10 F6000 ; lift Z relative to current position
;G1 H2 X510 Y510 F6000 ; go to first probe point
G1 H1 Z-99999
G90 ; absolute positioning
G30 ; home Z by probing the bed - activar 3D Touch
; Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 Z10 F100 ; lift Z relative to current positiond
;G90 ; absolute positioning
This is the actual homez.g working somehow...
; homez.g
; called to home the Z axis
;
; generated by RepRapFirmware Configuration Tool v3.1.4 on Fri Sep 04 2020 14:49:01 GMT+0800 (中国标准时间)
G91 ; relative positioning
G1 H2 Z10 F300 ; lift Z relative to current position
G90 ; absolute positioning
G1 X510 Y510 F10000 ; go to first probe point
G1 H1 Z-99999
;G1 X510 Y510 F3000 ; go to first probe point
G30 ; home Z by probing the bed
; Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 Z10 F300 ; lift Z relative to current positiond
;G90 ; absolute positioning
So the only main change is that I put G90 before the first probe point movement and Z axis moving down looking for endstops... (but not for the probe touching).
So I'm going to test now if once the machine hits the 4 endstops then go for the probe to touch the bed, that it's my objective, because I want to use the 4 endstops to calibrate the machine at the same heigh and then the probe for fine compensation of the bed.
But I don't know if that will work if all the movement on Z is on negative direction or I should put the 4 endstops on Z positive and probe for Z negative...
@jay_s_uk endstops are this https://www.digikey.es/product-detail/es/panasonic-industrial-automation-sales/PM-Y44/1110-2019-ND/3899551
the connection is this: 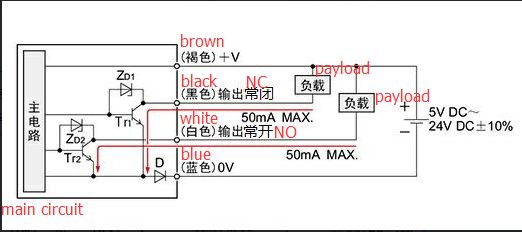
brown +V -> 5V_EXT
blue 0V - > GND
black output 1 LIGHT ON -> ioX.in
Wiring should be ok because X and Y axis are working fine... problem seems to be on the use of 4 pcs of endstops for one axis...
@jay_s_uk when I disconnect one endstop from the board is always triggered to true in normal case.
I tried disconnecting io5 and remains true, and disconnected all other 3 endstops and is true (that's normal), it was supposed to be false if they're connected and all working good.
So I really don't know where is the error, because the config file seems to be ok as far as I know...
@jay_s_uk but I have 4 endstops defined
M574 Z1 S1 P"io3.in+io4.in+io5.in+io6.in"
So it's not possible to see the status of each endstop when we use more than one for one axis?
Then I think the problem is that the one on io5.in that is the motor number 4
M584 X40.0 Y41.0 Z1:2:4:5 E20.0
appears to be always triggered...
@phaedrux because triggered is = true always and I have nothing connected to io2.in or any line in configuration with io2.in...
That's why I don't understand why appears the 2 port on endstops if I'm setting the Z with io3, io4, io5, and io6 inputs for the 4 stepper motors.