Wire and crimps/housings. I use Newark (newark.com). They are in the the Mid-West US. But any reputable electronics supply will do. I happen to like their search functions but most of the other place have similar. Probably not the most economical in the small order numbers we typically need. But at least you know your getting the right parts.
Posts made by Nurgelrot
-
RE: OK, not exactly wiring, but where can I buy wires in US??posted in Duet Hardware and wiring
-
RE: 3.6.beta2 1LC temp0 reporting low when used with SMT32 MB.posted in STM
@dc42 tanks sorry for the noise then
") need to keep up on my reading.
need to keep up on my reading. -
3.6.beta2 1LC temp0 reporting low when used with SMT32 MB.posted in STM
Don't know if this is an issue with the Duet3D TOOL1LC firmware or with the TeamGloomy STM32 Firmware on the main board. However when using 3.5.4 everything is fine. When updated to 3.6.0 beta2 the 121.temp0 sensor reports ~20C less and fluctuates +/- 1 deg very rapidly.
i.e. Right now its reporting 26C (the correct ambient temp) if I update everything to 3.6.0.beta2 it will report 6C +/-1
m122 === Diagnostics === RepRapFirmware for STM32F4 based Boards (octopuspro1_0_f4) version 3.5.4 (2024-11-27 23:16:40) running on STM32F4 (standalone mode) Board ID: V10S4-0J0JA-DQNT8-6L186-ZG2QN-40000 Used output buffers: 1 of 40 (18 max) === RTOS === Static ram: 21932 Dynamic ram: 97148 of which 1036 recycled Never used RAM 9928, free system stack 173 words CCMRam static ram: 24680 dynamic ram: 35772 free ram 5080 Tasks: NETWORK(1,ready,15.8%,163) HEAT(3,nWait 6,0.1%,289) Move(4,nWait 6,0.0%,345) CanReceiv(6,delaying,3.2%,300) CanSender(5,nWait 7,0.0%,436) CanClock(7,delaying,0.1%,372) TMC22xx(4,nWait 6,0.0%,167) TMC51xx(4,nWait 1,9.9%,138) FSWRITE(2,nWait 4,0.1%,485) MAIN(1,running,70.2%,501) IDLE(0,ready,0.6%,29), total 100.0% Owned mutexes: WiFi(NETWORK) === Platform === Last reset 00:11:07 ago, cause: software Last software reset at 2024-12-12 10:32, reason: User, Gcodes spinning, available RAM 9916, slot 0 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a Error status: 0x00 MCU temperature: min 44.9, current 48.7, max 48.7 Supply voltage: min 24.0, current 24.0, max 24.0, under voltage events: 0, over voltage events: 0, power good: yes Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0 Events: 0 queued, 0 completed Driver 0: standstill 5160, SG min n/a, mspos 8, reads 9515, writes 16 Driver 1: standstill 5160, SG min n/a, mspos 8, reads 9515, writes 16 Driver 2: standstill 5160, SG min n/a, mspos 8, reads 9516, writes 11 Driver 3: standstill 5160, SG min n/a, mspos 1016, reads 9516, writes 16 Driver 4: standstill 5160, SG min n/a, mspos 8, reads 9516, writes 16 Driver 5: standstill 5160, SG min n/a, mspos 1016, reads 9516, writes 16 Driver 6: standstill 5160, SG min n/a, mspos 8, reads 9516, writes 16 Driver 7: not present Driver 8: Driver 9: Driver 10: Driver 11: Driver 12: Driver 13: Date/time: 2024-12-12 10:43:14 Slowest loop: 49.66ms; fastest: 0.15ms === Storage === Free file entries: 20 SD card 0 detected SD card longest read time 5.0ms, write time 48.0ms, max retries 0 === Move === DMs created 83, segments created 0, maxWait 0ms, bed compensation in use: none, height map offset 0.000, max steps late 0, min interval 0, bad calcs 0, ebfmin 0.00, ebfmax 0.00 no step interrupt scheduled Moves shaped first try 0, on retry 0, too short 0, wrong shape 0, maybepossible 0 === DDARing 0 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === DDARing 1 === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 Heater 1 is on, I-accum = 0.0 === GCodes === Movement locks held by null, null HTTP is idle in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 File2 is idle in state(s) 0 Queue2 is idle in state(s) 0 Q0 segments left 0, axes/extruders owned 0x0004003 Code queue 0 is empty Q1 segments left 0, axes/extruders owned 0x0000000 Code queue 1 is empty === CAN === Messages queued 5999, received 13284, lost 0, errs 0, boc 0 Longest wait 3ms for reply type 6031, peak Tx sync delay 378 free buffers 50 (min 49), ts 3334/3333/0 Tx timeouts 0,0,0,0,0,0 === Network === Slowest loop: 194.05ms; fastest: 0.00ms Responder states: MQTT(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) HTTP sessions: 1 of 8 Uploads/Errors: 58/0 === WiFi === Interface state: active Module is connected to access point Failed messages: pending 0, notrdy 0, noresp 0 Bad header: 0/0 Firmware version 2.2.0 MAC address 2c:bc:bb:bc:86:bb Module reset reason: Power up, Vcc 0.00, flash size 4194304, free heap 180920 WiFi IP address 192.168.10.59 Signal strength -128dBm, channel 0, mode none, reconnections 0 Clock register 00003043 Socket states: 0 0 0 0 0 0 0 0m122 b121 Diagnostics for board 121: Duet TOOL1LC rev 1.1 or later firmware version 3.5.4 (2024-11-24 10:42:45) Bootloader ID: SAMC21 bootloader version 2.3 (2021-01-26b1) All averaging filters OK Never used RAM 3848, free system stack 136 words Tasks: Move(3,nWait 7,0.0%,134) HEAT(2,nWait 6,0.3%,112) CanAsync(5,nWait 4,0.0%,54) CanRecv(3,nWait 1,0.0%,70) CanClock(5,nWait 1,0.0%,58) ACCEL(3,nWait 6,0.0%,52) TMC(2,delaying,3.6%,52) MAIN(1,running,91.2%,314) IDLE(0,ready,0.0%,26) AIN(2,delaying,4.8%,112), total 100.0% Owned mutexes: Last reset 00:11:54 ago, cause: software Last software reset data not available Driver 0: pos 0, 562.0 steps/mm, standstill, SG min 0, read errors 0, write errors 1, ifcnt 51, reads 29589, writes 13, timeouts 0, DMA errors 0, CC errors 0, steps req 0 done 0 Moves scheduled 0, completed 0, in progress 0, hiccups 0, segs 0, step errors 0, maxLate 0 maxPrep 0, maxOverdue 0, maxInc 0, mcErrs 0, gcmErrs 0, ebfmin 0.00 max 0.00 Peak sync jitter -2/13, peak Rx sync delay 211, resyncs 0/0, no timer interrupt scheduled VIN voltage: min 23.8, current 23.8, max 23.8 MCU temperature: min 29.4C, current 30.4C, max 30.4C Last sensors broadcast 0x00000012 found 2 95 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 14239, send timeouts 0, received 6419, lost 0, errs 210, boc 0, free buffers 18, min 18, error reg 100000 dup 0, oos 0/0/0/0, bm 0, wbm 0, rxMotionDelay 0 Accelerometer: LIS3DH, status: 00 I2C bus errors 0, naks 3, contentions 0, other errors 0 -
RE: Turn OFF the paneldue when the controller is powered by a 5vdcposted in Duet Hardware and wiring
@Simon-1 I wired a slider switch into the 5v power line mounted to the side of the PD cases. Super easy if your using serial. Might be harder with the ribbon cable. However, I almost never use the switch the screen saver seems good enough.
-
RE: Long standing macro not working Only on 3.5rc4 and Mini5+posted in Beta Firmware
@dc42 just a follow upletting you and anyone following this issue that in my case the expression nesting was still too deep even under 3.5.1. I corrected it by making my macro a little cleaner. Basically not loading so much into one variable assignment. but spreading out the math
-
RE: 3.5.0rc4 - G29 crashes nozzle into bed after first probe pointposted in Beta Firmware
I was just able to reproduce this issues using a detachable prob (Klicky) Homing works G32 works. manually running M401/402 to get and store the porbe works but when issuing G29 it error with
4/17/2024, 8:26:56 PM g29 Error: G1: Probe already triggered before probing move startedand all hell breaks loose if you dont hit estop fast.This was with 3.5.rc4 on an Octopusprov1.0 and a 1LC toolboard. So it dosen't seem to be port/board specific. Let me know what data you need. This is one of my best printing units so I'm loth to do too much damage to it testing but happy to help out as much as I can.
-
RE: Long standing macro not working Only on 3.5rc4 and Mini5+posted in Beta Firmware
@Nurgelrot UPDATE @gloomyandy helped me identify someplaces where the macro could make better use of available stack space by loading some local varables with some expression results rather than parsing it all in one go. Fixed the problem. He specualated that in the Mini5+ and even some of the STM32F4xx boards that stack space was already pretty low in 3.4.6 and 3.5 pushed it over for this particular use case. Something for people to keep an eye on.
-
Long standing macro not working Only on 3.5rc4 and Mini5+posted in Beta Firmware
Hello, The print_area_mesh.g macro that many people have been using for a while now errors out on the Mini5+ under 3.5-rc4. with the following: (I cancelled the print.)
4/15/2024, 12:39:53 PM Cancelled printing file 0:/gcodes/testring.gcode, print time was 0h 10m 4/15/2024, 12:39:41 PM M25 Printing paused at X225.0 Y225.0 Z4.1 4/15/2024, 12:39:38 PM Resume state saved 4/15/2024, 12:39:38 PM Error: in file print_area_mesh.g line 58: unknown variable 'var.meshY' 4/15/2024, 12:39:38 PM Error: in file print_area_mesh.g line 57: unknown variable 'var.meshX' 4/15/2024, 12:39:38 PM Error: in file print_area_mesh.g line 44: in file macro line 0: Expression nesting too deep 4/15/2024, 12:39:38 PM Error: in file print_area_mesh.g line 43: in file macro line 0: Expression nesting too deep 4/15/2024, 12:39:38 PM Error: in file macro line 59: M557: unknown variable 'meshX' 4/15/2024, 12:39:38 PM 81 points probed, min error 0.010, max error 0.123, mean 0.063, deviation 0.026 Height map saved to file 0:/sys/heightmap.csv 4/15/2024, 12:31:23 PM Error: in file macro line 50: M557: unknown variable 'meshX' 4/15/2024, 12:31:23 PM Set probe grid to use X-min: 53.32040; X-max: 196.6800; Y-min: 53.32040; Y-max: 196.6800Exact same g-code sent to a mini5+ running 3.4.6 works as expected. ALSO works as expected when sent to a Super8pro Running the TeamGloomy STM32 port of RRF 3.5-4rc4. Is there some memory/other restriction im unaware of with the Mini5+?
macro run with
M98 P"print_area_mesh.g" A{first_layer_print_min[0]} B{first_layer_print_max[0]} C{first_layer_print_min[1]} D{first_layer_print_max[1]}in prusa slicer 2.7.4 start gcode; This command will only create a mesh of the print area ; This will reduce the printing time considerably by only probing what is needed var deviationFromOriginal = 20 var probeGridMinX = move.compensation.probeGrid.mins[0] var probeGridMaxX = move.compensation.probeGrid.maxs[0] var probeGridMinY = move.compensation.probeGrid.mins[1] var probeGridMaxY = move.compensation.probeGrid.maxs[1] var pamMinX = {var.probeGridMinX} ; Default the pamMinX value to the min x that is set for the mesh in M557. Originally coming from sys/printer_size_config.g var pamMaxX = {var.probeGridMaxX} ; Default the pamMaxX value to the min x that is set for the mesh in M557. Originally coming from sys/printer_size_config.g var pamMinY = {var.probeGridMinY} ; Default the pamMinY value to the min x that is set for the mesh in M557. Originally coming from sys/printer_size_config.g var pamMaxY = {var.probeGridMaxY} ; Default the pamMaxY value to the min x that is set for the mesh in M557. Originally coming from sys/printer_size_config.g var meshSpacing = {move.compensation.probeGrid.spacings[0]} ; Grabbing the spacing of the current M557 settings var minMeshPoints = 3 ; The minimal amount of probing points for both X & Y. var maxMeshPoints = 10 ; The max amount of probing points for both X & Y if exists(param.A) set var.pamMinX = {param.A} ; The min X position of the print job if exists(param.B) set var.pamMaxX = {param.B} ; The max X position of the print job if exists(param.C) set var.pamMinY = {param.C} ; The min Y position of the print job if exists(param.D) set var.pamMaxY = {param.D} ; The max Y position of the print job if (var.probeGridMinX + var.deviationFromOriginal) >= var.pamMinX ; Check if the difference between the min X and the print job min X is smaller than the set deviation set var.pamMinX = {var.probeGridMinX} ; The difference is smaller than the set deviation so set minX to the minimal of the printer's X if (var.probeGridMaxX - var.deviationFromOriginal) <= var.pamMaxX ; Check if the difference between the max X and the print job max X is smaller than the set devation set var.pamMaxX = {var.probeGridMaxX} ; The difference is smaller than the set devation so set maxX to the max of the printer's X if (var.probeGridMinY + var.deviationFromOriginal) >= var.pamMinY ; Check if the difference between the min Y and the print job min Y is smaller than the set devation set var.pamMinY = {var.probeGridMinY} ; the difference is smaller than the set devation so set minY to the minimal of the printer's Y if (var.probeGridMaxY - var.deviationFromOriginal) <= var.pamMaxY ; Check if the difference between the max X and the print job max X is smaller than the set devation set var.pamMaxY = {var.probeGridMaxY} ; The difference is smaller than the set devation so set maxY to the max of the printer's Y var meshX = floor(min(var.maxMeshPoints - 1, (max(var.minMeshPoints - 1, (var.pamMaxX - var.pamMinX) / var.meshSpacing) + 1))) ; Get the number of probes for X taking minMeshPoints and maxMeshPoints into account var meshY = floor(min(var.maxMeshPoints - 1, (max(var.minMeshPoints - 1, (var.pamMaxY - var.pamMinY) / var.meshSpacing) + 1))) ; Get the number of probes for Y taking minMeshPoints and maxMeshPoints into account var consoleMessage = "Set probe grid to use X-min: " ^ var.pamMinX ^ "; X-max: " ^ var.pamMaxX ^ "; Y-min: " ^ var.pamMinY ^ "; Y-max: " ^ var.pamMaxY "; Probing points: " ^ var.meshX ^ ";" ^ var.meshY ; Set the console message M118 P2 S{var.consoleMessage} ; send used probe grid to paneldue M118 P3 S{var.consoleMessage} ; send average to DWC console M557 X{var.pamMinX, var.pamMaxX} Y{var.pamMinY, var.pamMaxY} P{var.meshX, var.meshY} ; Set the probing mesh G0 X{var.pamMinX + ((var.pamMaxX - var.pamMinX)/2) - sensors.probes[0].offsets[0]} Y{var.pamMinY + ((var.pamMaxY - var.pamMinY)/2) - sensors.probes[0].offsets[1]} ; Move to the center of the print area G30 ; Set the z height for the center of the print area G29 ; Probe the print area ; Restore the probing mesh to the original settings set var.meshX = floor((var.probeGridMaxX - var.probeGridMinX) / var.meshSpacing + 1) set var.meshY = floor((var.probeGridMaxY - var.probeGridMinY) / var.meshSpacing + 1) M557 X{var.probeGridMinX, var.probeGridMaxX} Y{var.probeGridMinY, var.probeGridMaxY} P{var.meshX, var.meshY} -
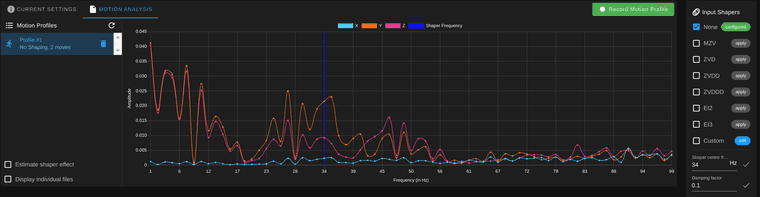
RE: How to read the Input Shaping Plugin data.posted in General Discussion
@chrishamm Right that's basically what I do. But I don't know playing around with a pretty graph until things look "flatter" bugs me
Is there was some way of knowing I'm doing it "Right"? I guess at the end of the day as long as the prints look corect its the only indicator. I doesn't help that in all the IS examples you see this clear peek none of my printers no matter how I adust them ever have pretty graphs. -
How to read the Input Shaping Plugin data.posted in General Discussion
Just what the title says
I've got a printer, Voron in this case, it prints well. I can muck around with IS and get the ringing down to minimal but I've no idea what im really doing just playing with numbers. I just had to redo some parts on it so I thought I'd take a bare bones motion capture and post it here and ask the comunity to tell me what setting I should be looking for. I Know I'm not the only one that could use a IS leason
-
RE: Magnet Filament Monitor V4 - Calibration Issueposted in Filament Monitor
NVM my issue seems to be spacific to the experimental nature of the hardware in that printer. I tested with another printer using current supported toolboars and it worked fine. Will test again when I can get a supported toolboard installed.
-
RE: Magnet Filament Monitor V4 - Calibration Issueposted in Filament Monitor
Im basically seeing this same behavior with other monitors. Once the Monitor is qureried with an
M591 D0It will repeat the same value for the rest of the print. It will however trigger an error and pause the printer if I go over and interfear with the feed.7/19/2023, 6:58:47 PM M591 D0 Pulse-type filament monitor on pin 124.io0.in, enabled, sensitivity 0.156mm/pulse, allowed movement 75% to 120%, check every 2.4mm, measured sensitivity 0.162mm/pulse, measured minimum 86%, maximum 109% over 949.8mm 7/19/2023, 5:49:24 PM M591 D0 Pulse-type filament monitor on pin 124.io0.in, enabled, sensitivity 0.156mm/pulse, allowed movement 75% to 120%, check every 2.4mm, measured sensitivity 0.162mm/pulse, measured minimum 86%, maximum 109% over 949.8mm 7/19/2023, 3:42:30 PM M591 D0 Pulse-type filament monitor on pin 124.io0.in, enabled, sensitivity 0.156mm/pulse, allowed movement 75% to 120%, check every 2.4mm, measured sensitivity 0.162mm/pulse, measured minimum 86%, maximum 109% over 949.8mmas you can see I've polled the monitor over a good sampling of time durring a print and its not changing.
Actaul filimaernt use at the time of the last poll:Filament Usage: 22419.1 mmGranted I'm using the SMT32 port of RRF 3.5.beta4 (and an experimental toolboard) but seems to be the same or simular issue as the OP:
fly_super8_pro_h723 stm32h723-wifi 3.5.0-beta.4_101 Duet 3 Expansion FlySB2040v1_0 FlySB2040v1_0 3.5.0-beta.4_101 Duet WiFi Server n/a 1.27-02S32-D Duet Web Control DWC 3.5.0-beta.4 -
RE: 6HC+1LC where connect filament sensor?posted in Duet Hardware and wiring
@jay_s_uk Thank for checking I could have sworn that they added an exception for the the simple switches. Might be able to reproduce the same functionality with a trigger? M581.
Or do what I do and mount the filament monitor to the frame and run the wire down with the boden tube. Sucks but its the best I could come up with.
-
RE: 6HC+1LC where connect filament sensor?posted in Duet Hardware and wiring
@Reine If you're only detecting the presence of filament you are supposed be able to wire a simple switch type monitor (1&2) to any board. Not positive if it was really implemented in 3.4+ or not. But I remember seeing some traffic on the subject.
-
RE: Help. Print stops extruding Toolboard Therm reads 2000cposted in General Discussion
@Phaedrux Yes everything should have been correctly wired and the problem did occur again two more times. I replaced the toolboard and that has solved the problem. I'm working under the assumption that I cooked the previous toolboard. As I have temps reaching 80+ C reported from the board for long periods on an identical build that has not been in service as long. It just a guess right now but... Will figure out how to drop the temps and continue to watch it.
-
RE: Help. Print stops extruding Toolboard Therm reads 2000cposted in General Discussion
@Nurgelrot I have the filament runout manually disabled if anyone see that -It's not part of the problem
-
Help. Print stops extruding Toolboard Therm reads 2000cposted in General Discussion
Today on my Duet 6HC + 1LC I've run into a problem where while printing the 121.temp0 sensor reports 2000c and the heater turns off the printer continues to print (no longer extruding)
I receive no indication of an error until I cancel the print then i get
Error: Board 121 does not have heater 1 3/27/2023, 9:59:39 AM Error: Failed to switch off remote heater 1: Board 121 does not have heater 1 3/27/2023, 9:59:39 AM Error: Failed to switch off remote heater 1: Board 121 does not have heater 1 3/27/2023, 9:59:39 AM Error: M106: Board 121 doesn't have fan 0Oh before that while the printer was printing in aire I also got
3/27/2023, 9:37:07 AM Warning: Driver 0.3 warning: phase A may be disconnected 3/27/2023, 9:36:32 AM Warning: Driver 0.3 warning: phase B may be disconnected 3/27/2023, 9:36:32 AM Warning: Driver 0.2 warning: phase B may be disconnectedwhich are 2 of my 4 z motors.
the M122 B121 log show this about the time i'd estimate it all went bad:
Last software reset at 2023-03-27 09:19, reason: WatchdogTimeout, available RAM 2204, slot 0Any Idea whats going on here? Voron 2.4 RRF 3.4.5
m122 === Diagnostics === RepRapFirmware for Duet 3 MB6HC version 3.4.5 (2022-11-30 19:35:23) running on Duet 3 MB6HC v1.01 (SBC mode) Board ID: 08DJM-956BA-NA3TN-6J1FL-3S86M-9TBLT Used output buffers: 8 of 40 (40 max) === RTOS === Static ram: 152760 Dynamic ram: 68964 of which 12 recycled Never used RAM 125096, free system stack 114 words Tasks: SBC(resourceWait:,1.8%,462) HEAT(notifyWait,0.0%,322) Move(notifyWait,1.4%,245) CanReceiv(notifyWait,0.0%,772) CanSender(notifyWait,0.0%,328) CanClock(delaying,0.0%,339) TMC(notifyWait,20.9%,57) MAIN(running,73.4%,923) IDLE(ready,2.3%,30), total 100.0% Owned mutexes: HTTP(MAIN) === Platform === Last reset 02:36:05 ago, cause: power up Last software reset at 2023-03-27 07:04, reason: User, GCodes spinning, available RAM 129632, slot 0 Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task SBC Freestk 0 n/a Error status: 0x04 Aux0 errors 0,5,0 Step timer max interval 307 MCU temperature: min 33.3, current 40.0, max 41.3 Supply voltage: min 24.0, current 24.1, max 24.2, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.2, current 12.2, max 12.3, under voltage events: 0 Heap OK, handles allocated/used 99/0, heap memory allocated/used/recyclable 2048/96/96, gc cycles 4 Events: 3 queued, 3 completed Driver 0: standstill, SG min 0, mspos 984, reads 15635, writes 70 timeouts 0 Driver 1: standstill, SG min 0, mspos 552, reads 15635, writes 70 timeouts 0 Driver 2: standstill, SG min 0, mspos 824, reads 15636, writes 70 timeouts 0 Driver 3: standstill, SG min 0, mspos 728, reads 15636, writes 70 timeouts 0 Driver 4: standstill, SG min 0, mspos 392, reads 15667, writes 39 timeouts 0 Driver 5: standstill, SG min 0, mspos 1000, reads 15667, writes 39 timeouts 0 Date/time: 2023-03-27 10:00:55 Slowest loop: 1000.25ms; fastest: 0.04ms === Storage === Free file entries: 10 SD card 0 not detected, interface speed: 37.5MBytes/sec SD card longest read time 0.0ms, write time 0.0ms, max retries 0 === Move === DMs created 125, segments created 41, maxWait 2639172ms, bed compensation in use: mesh, comp offset 0.000 === MainDDARing === Scheduled moves 81149, completed 81149, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 110], CDDA state -1 === AuxDDARing === Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1 === Heat === Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0 Heater 0 is on, I-accum = 0.3 === GCodes === Segments left: 0 Movement lock held by null HTTP* is doing "M122" in state(s) 0 Telnet is idle in state(s) 0 File* is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger* is idle in state(s) 0 Queue* is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty === Filament sensors === Extruder 0: no data received === CAN === Messages queued 156058, received 162512, lost 0, boc 0 Longest wait 4ms for reply type 6013, peak Tx sync delay 45773, free buffers 50 (min 29), ts 46826/46825/0 Tx timeouts 0,0,0,0,0,0 === SBC interface === Transfer state: 5, failed transfers: 0, checksum errors: 0 RX/TX seq numbers: 46251/41411 SPI underruns 0, overruns 0 State: 5, disconnects: 0, timeouts: 0 total, 0 by SBC, IAP RAM available 0x2ad48 Buffer RX/TX: 0/0-0, open files: 0 === Duet Control Server === Duet Control Server v3.4.5 Code buffer space: 4096 Configured SPI speed: 8000000Hz, TfrRdy pin glitches: 1 Full transfers per second: 39.48, max time between full transfers: 90.8ms, max pin wait times: 3298.2ms/12.5ms Codes per second: 9.26 Maximum length of RX/TX data transfers: 3272/1664 m122 b121 Diagnostics for board 121: Duet TOOL1LC rev 1.1 or later firmware version 3.4.4 (2022-10-14 11:46:33) Bootloader ID: SAMC21 bootloader version 2.3 (2021-01-26b1) All averaging filters OK Never used RAM 3080, free system stack 45 words Tasks: Move(notifyWait,0.4%,91) HEAT(notifyWait,0.1%,115) CanAsync(notifyWait,0.0%,65) CanRecv(notifyWait,0.1%,74) CanClock(notifyWait,0.0%,65) ACCEL(notifyWait,0.0%,61) TMC(notifyWait,3.0%,57) MAIN(running,91.5%,441) IDLE(ready,0.0%,26) AIN(delaying,4.9%,142), total 100.0% Last reset 00:41:31 ago, cause: software Last software reset at 2023-03-27 09:19, reason: WatchdogTimeout, available RAM 2204, slot 0 Software reset code 0x00a0 ICSR 0x04413011 SP 0x20007ed0 Task CanR Freestk 6560 ok Stack: 20004778 00000002 42003800 00000080 200032a4 a5a5a5a5 0000c63a 01000013 2000316c a5a5a5a5 0000c629 20004778 34441b56 20003194 40002800 0000cb31 00000020 00000020 20003194 000177ed a5a5a5a5 a5a5a5a5 a5a5a5a5 a5a5a5a5 a5a5a5a5 fffffff1 200032a4 Driver 0: pos 342077, 80.0 steps/mm,standstill, SG min 0, read errors 0, write errors 1, ifcnt 25, reads 62661, writes 11, timeouts 0, DMA errors 0, CC errors 0, steps req 541579 done 541579 Moves scheduled 26181, completed 26181, in progress 0, hiccups 0, step errors 0, maxPrep 586, maxOverdue 876778178, maxInc 876778178, mcErrs 0, gcmErrs 0 Peak sync jitter 2/7, peak Rx sync delay 476, resyncs 0/0, no step interrupt scheduled VIN voltage: min 24.0, current 24.0, max 24.0 MCU temperature: min 65.0C, current 67.2C, max 69.0C Last sensors broadcast 0x00000000 found 0 243 ticks ago, 0 ordering errs, loop time 0 CAN messages queued 19975, send timeouts 0, received 43966, lost 41709, free buffers 37, min 0, error reg 0 dup 0, oos 3/1/0/9, bm 0, wbm 0, rxMotionDelay 47527, adv -873545583/876852842 Accelerometer: LIS3DH, status: 00 I2C bus errors 0, naks 3, other errors 0 -
RE: SBC mode on non-pi'sposted in General Discussion
@Falcounet yep I got /dev/spidev0.0 /dev/spidev0.1 to show up an got them merged into the current kernel passed in the bufsiz on the grub line options to the kernel cuz the modprobe.d method doesn't work. Just would not talk. Error 19. Maybe I'll get curious in few days and go for another round with it.
-
RE: Does the future belong to PanelDue oder DWC on SBC-Screens?posted in PanelDue
On the SBC side of the house. I had an idea to write a X Window app that is basically the PD layout. People may argue why not just run DWC? But in my mind this app would basically be the PD and screen for the SBC at the same time. and not connect via network but direct to OS&DSF. Basically klipper screen concept for RRF+SBC makes obtaining a touchscreen for your RRF printer really easy hardware wise.
I think this a great idea but lack the skill to actually make it haha. I'm useless that way
-
RE: SBC mode on non-pi'sposted in General Discussion
I just spent 2 day trying to get Le Potato working with RRF - with both the standard Duet3 boards as well as some STM32F4's.
No Dice. The issue isn't the TranferReadyPin thats pretty easy to find and use. Line 79 on /dev/gpiochip1. The real issues is the lack of OS images with working SPI overlays. I was able to get it loaded into the kernel with the Raspian image off the Libre Computers site and their wiringTools package. But was unable to get DuetControlServer to talk over it.
So I give up
if anyone else gets it working drop me a note I'd love to know what I was doing wrong.