Problem solved. I had to reduce the microstepping to 16. Works just fine now.
Best posts made by simplesimson
-
RE: Print stops always at the same Z hightposted in My Duet controlled machine
-
RE: IR probe and Duet Maestroposted in IR Height Sensor
Good morning. The Probe works as it should. It Reports 460-530 in trigger range.
I must have made a misstake. If somebody in future has the same Problem. Have a look at your Z-Speed I slowed it down a lot maybe thats been a Issue. Also I changed my cable routing.
I had the suspission that the heating of my hotend might have an effect on the signal of the probe.
ty for your help
Latest posts made by simplesimson
-
Connecting External Servo Drive for Linear Motion Axisposted in Duet Hardware and wiring
Hi,
i want to create the following setup:
2x Duet 6HC
2x Jenny Science Lxs F60
Lxs F60
2x Xvi 75V8S
5x Stepper
6x PT1000
4x 50W Heater for 2x Extruder with each 100WI am building a machine in industrial enviorment. Thus i need very high speeds.
I need some advice for connecting the external servo controllers. Documentation can be found here: https://www.jennyscience.com/asset/2492/f2e4570f5b5c032132612bf16abb228a?origin=/en/download
I cant find a documentation on how to connect 2x DUET3 and several external CAN servo controller. Would be very greatful for help! -
RE: Duet Maestro BL-Touch Not workingposted in Duet Hardware and wiring
@phaedrux said in Duet Maestro BL-Touch Not working:
@simplesimson said in Duet Maestro BL-Touch Not working:
so i have inverted the signal by the probe. meaning it shows 1000 when it is retracted.
However: when i deploy it with M401 it still reads 1000, if i touch it ever so slightly it goes to 0. Ideas?The deploy state and trigger state of the probe are not related. You're focusing on the 0/1000 reading too much. It doesn't matter. It's only relevant during an actual probing move and even then, it will be so fast you won't be able to see it change. The fact that the reading changes to 1000 when the white wire is removed means it's getting a reading correctly. Change your M558 back to the way it was before the inversion. It should read 0 normally.
If i change it back i can not deploy. I think this is because it thinks it is already deployed? As the signal reads 0 isnt this the feedback for beeing deployed?
If you're able to deploy and retract the probe by sending M401 and M402 that's great. The next step is to test if the probe will deploy and trigger with an actual G30.
https://duet3d.dozuki.com/Wiki/Test_and_calibrate_the_Z_probe
atm I am able to print - so do everything including leveling by using the I0 in my deployprobe.g. Meaning as soon as it gets deployed i turn the inversion off.
As soon as i retractprobe.g I again turn it back on with I1.Leaving any of the inversion (I0 or I1) out results in total malfunction.
It is a very dirty work around but i dont know how to skip it. Do i understand you correct. The probe returns 0 when retracted? If so it only returns 1000 for the split second its triggerd somewhere in the middle of its stroke?
-
RE: Duet Maestro BL-Touch Not workingposted in Duet Hardware and wiring
@Phaedrux I made progress.
I have tryed around. Now I am able to deploy the probe. But:
I had to change this:M558 P9 H5 F120 T6000 I1so i have inverted the signal by the probe. meaning it shows 1000 when it is retracted.
However: when i deploy it with M401 it still reads 1000, if i touch it ever so slightly it goes to 0. Ideas?New M122:
M122 === Diagnostics === RepRapFirmware for Duet 2 Maestro version 2.05.1 running on Duet Maestro 1.0 Board ID: 08DJM-956DU-LL3SW-6J9F2-3SJ6T-KVHGR Used output buffers: 3 of 24 (6 max) === RTOS === Static ram: 19804 Dynamic ram: 91112 of which 56 recycled Exception stack ram used: 204 Never used ram: 19896 Tasks: NETWORK(ready,1220) HEAT(blocked,1328) MAIN(running,3896) IDLE(ready,160) Owned mutexes: === Platform === Last reset 00:01:33 ago, cause: software Last software reset time unknown, reason: User, spinning module GCodes, available RAM 19888 bytes (slot 2) Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0400f000 BFAR 0xe000ed38 SP 0xffffffff Task 0x4e49414d Error status: 0 Free file entries: 10 SD card 0 detected, interface speed: 15.0MBytes/sec SD card longest block write time: 0.0ms, max retries 0 MCU temperature: min 39.3, current 39.5, max 40.0 Supply voltage: min 0.0, current 20.2, max 20.2, under voltage events: 0, over voltage events: 0, power good: yes Driver 0: standstill, read errors 0, write errors 1, ifcount 56, reads 3729, timeouts 0 Driver 1: standstill, read errors 0, write errors 1, ifcount 56, reads 3729, timeouts 0 Driver 2: standstill, read errors 0, write errors 1, ifcount 56, reads 3729, timeouts 0 Driver 3: standstill, read errors 0, write errors 1, ifcount 48, reads 3726, timeouts 3 Driver 4: standstill, read errors 0, write errors 1, ifcount 48, reads 3729, timeouts 0 Driver 5: ok, read errors 0, write errors 0, ifcount 0, reads 0, timeouts 3735 Driver 6: ok, read errors 0, write errors 0, ifcount 0, reads 0, timeouts 3735 Date/time: 1970-01-01 00:00:00 Slowest loop: 2.87ms; fastest: 0.05ms I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0 === Move === Hiccups: 0, FreeDm: 160, MinFreeDm: 160, MaxWait: 0ms Bed compensation in use: none, comp offset 0.000 === DDARing === Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 === Heat === Bed heaters = 0, chamberHeaters = -1 -1 === GCodes === Segments left: 0 Stack records: 2 allocated, 0 in use Movement lock held by null http is idle in state(s) 0 telnet is idle in state(s) 0 file is idle in state(s) 0 serial is idle in state(s) 0 aux is idle in state(s) 0 daemon is idle in state(s) 0 queue is idle in state(s) 0 lcd is idle in state(s) 0 autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 4.16ms; fastest: 0.02ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0) HTTP sessions: 1 of 8 Interface state 5, link 100Mbps full duplexEDIT: Idea: i could do a dirty workaround by changing the deployprobe.g with a M558 I0 so that the probe reads 0 when being deployed. As soon as it retracts the retractprobe.g needs to swap to M558 I1 to change the value to 1000 when being retracted.
-
RE: Duet Maestro BL-Touch Not workingposted in Duet Hardware and wiring
@phaedrux said in Duet Maestro BL-Touch Not working:
@simplesimson said in Duet Maestro BL-Touch Not working:
if i pull the pin out - so deploy it manually - the red light turns off.
Pulling the pin out isn't the same as deploying it. Pulling it out would cause an error state. There is an electromagnet that actions the deployment.
okay understood. - should the probe be pulled up by the magnet when my hand releases the pin? Or is it just held in the upper position?
@simplesimson said in Duet Maestro BL-Touch Not working:
The value of the Z-Probe in DWC always reports 0
This is expected. The probe only triggers when it's been properly deployed and even then the value is only active for a very brief moment before it resets and retracts the pin. If you disconnect the white wire you may be able to see the value change to 1000.
Roger. changes to 1000 when i pull the white wire.
@simplesimson said in Duet Maestro BL-Touch Not working:
tryed the 240ohms resistor between pin 1 and two of the duet
Not necessary for BLtouch beyond V1 or with the Maestro.
Can you please show the contents of deployprobe.g and retractprobe.g?
Can you send M122 and M98 P"config.g" and post the results?0:/sys/deployprobe.g
M280 P64 S100:/sys/retractprobe.g
M280 P64 S90config-override.g
; config-override.g file generated in response to M500 at 2021-03-18 13:33 ; This is a system-generated file - do not edit ; Heater model parameters M307 H0 A115.7 C497.7 D1.7 S0.50 V23.6 B0 M307 H1 A501.6 C178.0 D4.0 S1.00 V23.7 B0 M307 H2 A340.0 C140.0 D5.5 S1.00 V0.0 B0 G10 L2 P1 X0.00 Y0.00 Z0.00 G10 L2 P2 X0.00 Y0.00 Z0.00 G10 L2 P3 X0.00 Y0.00 Z0.00 G10 L2 P4 X0.00 Y0.00 Z0.00 G10 L2 P5 X0.00 Y0.00 Z0.00 G10 L2 P6 X0.00 Y0.00 Z0.00 G10 L2 P7 X0.00 Y0.00 Z0.00 G10 L2 P8 X0.00 Y0.00 Z0.00 G10 L2 P9 X0.00 Y0.00 Z0.00M122
M122 === Diagnostics === RepRapFirmware for Duet 2 Maestro version 2.05.1 running on Duet Maestro 1.0 Board ID: 08DJM-956DU-LL3SW-6J9F2-3SJ6T-KVHGR Used output buffers: 3 of 24 (6 max) === RTOS === Static ram: 19804 Dynamic ram: 91112 of which 56 recycled Exception stack ram used: 204 Never used ram: 19896 Tasks: NETWORK(ready,764) HEAT(blocked,1296) MAIN(running,3896) IDLE(ready,160) Owned mutexes: === Platform === Last reset 00:06:11 ago, cause: software Last software reset at 2021-12-15 09:25, reason: User, spinning module GCodes, available RAM 23676 bytes (slot 3) Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0400f000 BFAR 0xe000ed38 SP 0xffffffff Task 0x4e49414d Error status: 0 Free file entries: 10 SD card 0 detected, interface speed: 15.0MBytes/sec SD card longest block write time: 0.0ms, max retries 0 MCU temperature: min 38.4, current 38.7, max 39.0 Supply voltage: min 0.0, current 20.2, max 20.2, under voltage events: 0, over voltage events: 0, power good: yes Driver 0: standstill, read errors 0, write errors 1, ifcount 13, reads 14863, timeouts 0 Driver 1: standstill, read errors 0, write errors 1, ifcount 13, reads 14863, timeouts 0 Driver 2: standstill, read errors 0, write errors 1, ifcount 13, reads 14863, timeouts 0 Driver 3: standstill, read errors 0, write errors 1, ifcount 13, reads 14847, timeouts 16 Driver 4: standstill, read errors 0, write errors 1, ifcount 13, reads 14863, timeouts 0 Driver 5: ok, read errors 0, write errors 0, ifcount 0, reads 0, timeouts 14869 Driver 6: ok, read errors 0, write errors 0, ifcount 0, reads 0, timeouts 14869 Date/time: 1970-01-01 00:00:00 Slowest loop: 4.83ms; fastest: 0.05ms I2C nak errors 0, send timeouts 0, receive timeouts 0, finishTimeouts 0, resets 0 === Move === Hiccups: 0, FreeDm: 160, MinFreeDm: 160, MaxWait: 0ms Bed compensation in use: none, comp offset 0.000 === DDARing === Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 === Heat === Bed heaters = 0, chamberHeaters = -1 -1 === GCodes === Segments left: 0 Stack records: 2 allocated, 0 in use Movement lock held by null http is idle in state(s) 0 telnet is idle in state(s) 0 file is idle in state(s) 0 serial is idle in state(s) 0 aux is idle in state(s) 0 daemon is idle in state(s) 0 queue is idle in state(s) 0 lcd is idle in state(s) 0 autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 7.25ms; fastest: 0.02ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0) HTTP sessions: 1 of 8 Interface state 5, link 100Mbps full duplexM98 P"config.g"
M98 P"config.g" HTTP is enabled on port 80 FTP is enabled on port 21 TELNET is enabled on port 23 Warning: Heater 1 appears to be over-powered. If left on at full power, its temperature is predicted to reach 526C.Do you have any idea how i can test if the servo output is still working? i guess if the servo out would not work the hole probe would not show a different behavior?
-
RE: Duet Maestro BL-Touch Not workingposted in Duet Hardware and wiring
@Phaedrux thanks for your help!
@phaedrux said in Duet Maestro BL-Touch Not working:
@simplesimson said in Duet Maestro BL-Touch Not working:
Is it correct that the BLtouch does the retracting move twice on boot up? Knowing this alone would mean much to me.
Yes it does.
@simplesimson said in Duet Maestro BL-Touch Not working:
In all M280 commands, use P64 instead of P3, and leave out the I1
Sounds correct for meastro. Can you share what you actually have?
@simplesimson said in Duet Maestro BL-Touch Not working:
;Z-Probe setup for BLtouch M558 P9 H5 F100 T2000 G31 X0 Y55 Z0 P25
Looks ok.
@simplesimson said in Duet Maestro BL-Touch Not working:
Make sure you change it to use +3.3V instead of +5V before you connect it or you risk damaging your board!
You won't need to worry about this.
@simplesimson said in Duet Maestro BL-Touch Not working:
Any suggestions how to proceed?
How do you actually have it wired up?
It should look like this.
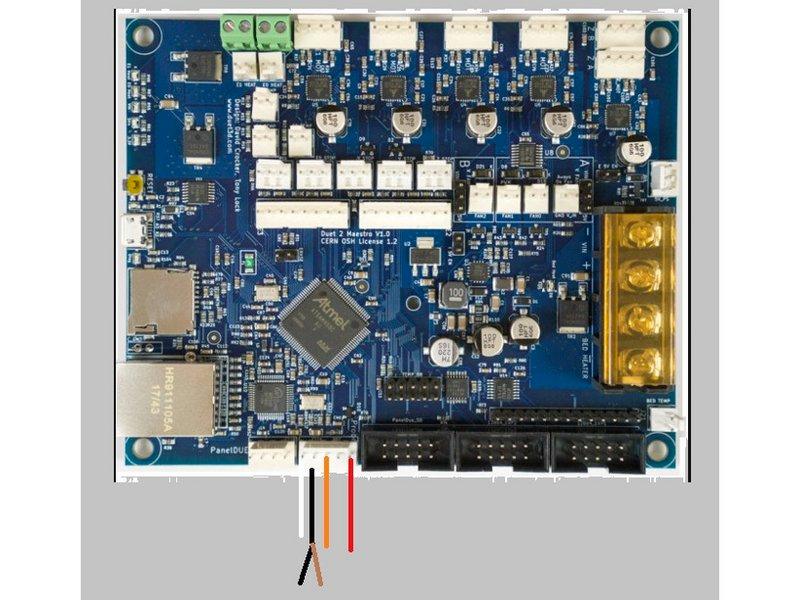
my debug steps yesterday evening:that is how i did wire it up. I connected both grounds near the bltouch and. I have tested the leads from the connector all the way to the bltouch - with good result.
tryed to test the probes integrity:
The power on Self test by the probe always seems to work.
If i disconnect the yellow wire i also can provoke the blue light to shine. Indicating the yellow wire error.The Probe stays retracted after it selftest, the light on the probe´s red LED is on. if i pull the pin out - so deploy it manually - the red light turns off. The value of the Z-Probe in DWC always reports 0 (retraced deployed no difference).
If it reports 0 and not 1000 means that something returns a valid value?-
antclaps says that S60 should turn of alarm and deploy - also s160 should turn of alarm and deploy read here: https://www.antclabs.com/bltouch-v3 (end of first third of page)
also tryed the 3,3 V setup -
tryed the 240ohms resistor between pin 1 and two of the duet, so input/ground - no difference with 5V. With 3,3 V setup it than does not complete its selftest and blinks red.
Still returning z-probe =0 -
complete! new firmware flash onto new SD-Card with config file directly from configtool - exaclty the same. repeated step 1 to 5 with new firmware. No changes whatsoever.
-
very disappointed bad nights rest
 because i didnt get my victory beer
because i didnt get my victory beer
Do you have any ideas what i could test?
-
-
RE: Duet Maestro BL-Touch Not workingposted in Duet Hardware and wiring
I would like to try wiring the BLTouch to the Z-Endstops and the servo part of the BL-Touch to a different PWM port. Any suggestions how to proceed?
After about 12h of fiddeling around and setting up the hole printer up from scretch I cant find any other solution than that my Ports on the board must be fried. -
RE: Duet Maestro BL-Touch Not workingposted in Duet Hardware and wiring
when I set up a new config with the config tool to create a new config from scretch the configtool tells me:
Make sure you change it to use +3.3V instead of +5V before you connect it or you risk damaging your board!
Contrary to https://duet3d.dozuki.com/Wiki/Connecting_a_Z_probe#Section_BLTouch where the 5V is connected.
Still the rest remains the same and the error unsolved. Really would apreciate help.
Is it correct that the BLtouch does the retracting move twice on boot up? Knowing this alone would mean much to me.
-
RE: Duet Maestro BL-Touch Not workingposted in Duet Hardware and wiring
@simplesimson said in Duet Maestro BL-Touch Not working:
Hi,
i have changed from using the IR-Probe to BL-Touch. Did not buy the clone.
I cant get it to be working.
Running version 2.05
Situation: I turn on the 3d printer and the probe delpoys and retracts itself two times.Wrong category sorry - cant find the edit for this .
-
Duet Maestro BL-Touch Not workingposted in Duet Hardware and wiring
Hi,
i have changed from using the IR-Probe to BL-Touch. Did not buy the clone.
I cant get it to be working.Running version 2.05
Situation: I turn on the 3d printer and the probe delpoys and retracts itself two times.
Than it stays retracted. Reading in DWC of z probe shows value of 0. Also if i pull on the probe it does not change.
I can not deploy the probe nor can i retract it.
I have created the deployprobe.g and retractprobe.g and copy pasted the gcode in.did read an follow this:
The M307 line is not required
In all M280 commands, use P64 instead of P3, and leave out the I1. This applies to the following section too.Thoughts: Is my m558 set right?
Here is my config.g file:
; Configuration file for Duet Maestro (firmware version 2.03) ; executed by the firmware on start-up ; ; ; General preferences G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M550 P"CoreXY" ; set printer name M667 S1 ; select CoreXY mode M918 P1 E4 F2000000 ; configure direct-connect display ; Network M552 S1 P192.168.1.29 ; enable network and acquire dynamic address via DHCP M586 P0 S1 ; enable HTTP M586 P1 S1 ; enable FTP M586 P2 S1 ; enable Telnet ; Drives M569 P0 S0 ; physical drive 0 goes forwards M569 P1 S0 ; physical drive 1 goes forwards M569 P2 S1 ; physical drive 2 goes forwards M569 P3 S0 ; physical drive 3 goes forwards M584 X0 Y1 Z2 E3 ; set drive mapping ;steps M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation M92 X160 Y160 Z400.00 E415 ;E409.54 ; set steps per mm ;speeds M566 X600.00 Y600.00 Z24.00 E120.00 ; set maximum instantaneous speed changes (mm/min) M203 X12000.00 Y12000.00 Z300.00 E12000.00 ; set maximum speeds (mm/min) M201 X1500.00 Y1500.00 Z100.00 E1500.00 ; set accelerations (mm/s^2) ;motorcurrent M906 X900 Y900 Z400 E900 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S30 ; Set idle timeout ; Axis Limits M208 X-10 Y0 Z0 S1 ; set axis minima M208 X300 Y300 Z340 S0 ; set axis maxima ; Endstops M574 X1 Y2 S1 ; set active high endstops M574 Z1 S2 ; set endstops controlled by probe ; Z-Probe - old for IR PRobe was working 12-12-21 ;M558 P1 R0.5 F150 T9000 H3 A1 ; set Z probe type to unmodulated and the dive height + speeds ;G31 P500 X-2 Y-20 Z1.67 ; set Z probe trigger value, offset and trigger height - Z wert bestimmt den wert, den die Z achse nach auslösen des sensors ;mit der Nozzle näher an tisch fährt. -> wert größer ist näher dran ;M557 X15:280 Y20:270 P9:9 ; define mesh grid ;Z-Probe setup for BLtouch M558 P9 H5 F100 T2000 G31 X0 Y55 Z0 P25 ;heaters ;BED M305 P0 T98801 B4185 R2200 ; set thermistor for bend M143 H0 S120 ; max temp ;E0 M305 P1 B4725 C7.060000e-8 ; Set thermistor M143 H1 S280 ; Set temperature limit for heater 1 to 260C ; Fans M106 P0 S0 I0 F500 M106 P2 S1 I0 F500 H1 T45 ; Tools M563 P0 D0 H1 F0 ; define tool 0 P0 tool number - S"1" tool "name" - D"0" Extruder Drive "0" - H1 heater ;number 1 - Fan number 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Custom settings are not defined ; Miscellaneous M501 ; load saved parameters from non-volatile memory see configoverride.g M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss -
RE: Q1 fell offposted in IR Height Sensor
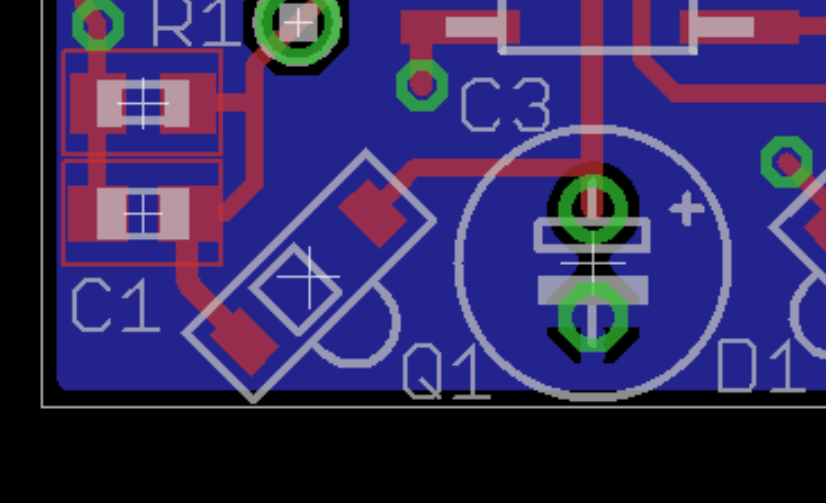
source: https://github.com/dc42/OrmerodSensorBoard/blob/master/SchematicAndPCB/Mini-differential-IR/V1.2/board.png
@dc42 the parts arrived. but i think i have to point the green square on the back as shown on the scematic or? so that its towards the corner of the pcb, away from the black capacitor, or?Regards, Simon
EDIT: I tryed it as you described. I had to face green square to the outside for it to read