@droftarts
I get:
HTTP is enabled on port 80
FTP is disabled
TELNET is disabled
Is it possible that the servo is broken?
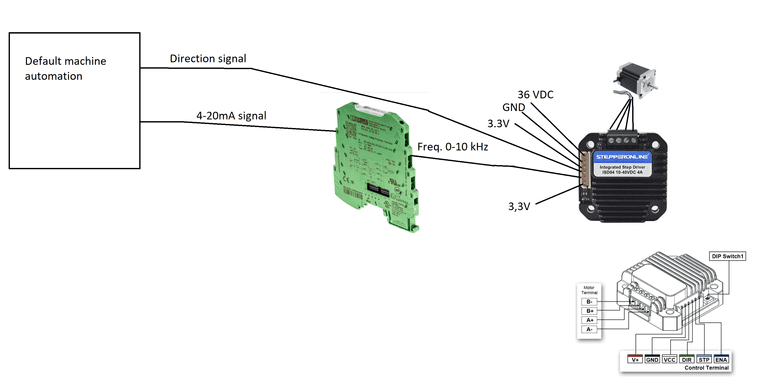
Can incorrect wiring to right pins cause damage to Duet or the servos?
The servos that I have can rotate by hand more than they can by when they are controlled electronically. Do they have to be in certain starting position to work?
M122
M122
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.4.5 (2022-11-30 19:35:23) running on Duet 3 MB6HC v1.01 (standalone mode)
Board ID: 08DJM-956BA-NA3TJ-6J9D2-3S06T-9V8GT
Used output buffers: 3 of 40 (14 max)
=== RTOS ===
Static ram: 152760
Dynamic ram: 98776 of which 400 recycled
Never used RAM 98736, free system stack 206 words
Tasks: NETWORK(ready,35.1%,252) ETHERNET(notifyWait,0.2%,561) ACCEL(notifyWait,0.0%,348) HEAT(notifyWait,0.0%,322) Move(notifyWait,0.0%,351) CanReceiv(notifyWait,0.0%,944) CanSender(notifyWait,0.0%,336) CanClock(delaying,0.0%,333) TMC(notifyWait,7.8%,91) MAIN(running,56.6%,925) IDLE(ready,0.2%,30), total 100.0%
Owned mutexes:
=== Platform ===
Last reset 00:00:55 ago, cause: power up
Last software reset at 2023-01-02 16:44, reason: User, GCodes spinning, available RAM 98736, slot 1
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00400000 BFAR 0x00000000 SP 0x00000000 Task MAIN Freestk 0 n/a
Error status: 0x00
Aux0 errors 0,0,0
Step timer max interval 127
MCU temperature: min 28.9, current 39.7, max 39.9
Supply voltage: min 24.3, current 24.4, max 24.4, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.1, current 12.1, max 12.2, under voltage events: 0
Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0
Events: 0 queued, 0 completed
Driver 0: standstill, SG min 0, mspos 8, reads 46633, writes 14 timeouts 0
Driver 1: standstill, SG min 0, mspos 8, reads 46633, writes 14 timeouts 0
Driver 2: standstill, SG min 0, mspos 8, reads 46634, writes 14 timeouts 0
Driver 3: standstill, SG min 0, mspos 8, reads 46634, writes 14 timeouts 0
Driver 4: standstill, SG min 0, mspos 8, reads 46634, writes 14 timeouts 0
Driver 5: standstill, SG min 0, mspos 8, reads 46634, writes 14 timeouts 0
Date/time: 2023-01-03 11:35:39
Slowest loop: 4.43ms; fastest: 0.05ms
=== Storage ===
Free file entries: 10
SD card 0 detected, interface speed: 25.0MBytes/sec
SD card longest read time 2.4ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 125, segments created 0, maxWait 0ms, bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== AuxDDARing ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty
=== CAN ===
Messages queued 500, received 0, lost 0, boc 0
Longest wait 0ms for reply type 0, peak Tx sync delay 0, free buffers 50 (min 50), ts 279/0/0
Tx timeouts 0,0,278,0,0,220 last cancelled message type 30 dest 127
=== Network ===
Slowest loop: 4.33ms; fastest: 0.03ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0) Telnet(0)
HTTP sessions: 1 of 8
= Ethernet =
State: active
Error counts: 0 0 0 1 0 0
Socket states: 5 2 2 2 2 0 0 0
=== Multicast handler ===
Responder is inactive, messages received 0, responses 0