hbot homes correctly but prints mirrored ,
-
i have tried everything i can, except what works. and decided to revert back to 2.05.1
everything works even the bltouch. im going to wait till a more streamlined 3xx comes along.
want to say thanks to everyone for all the help along the way, it was not wasted as it showed me how to get the proper settings for homing and machine travel and set it all right in 2xx.last question, can the web interface be set up with keyboard commands, such as up , down , left , right arrow keys (keyboard input) to control motion on the printer?
-
Sounds like something hasn't made the upgrade to 3.1 fully , so when you downgrade it back to version 2 you get it working .
When I upgraded the firmware I first made a copy of my SD and put it on a new SD card so I could go back to the same configurations.
If you keep swapping between the versions with different config files , you may be forgetting to change a setting.
an the web interface be set up with keyboard commands, such as up , down , left , right arrow keys ?
No idea , it need some sort of key mapping .
-
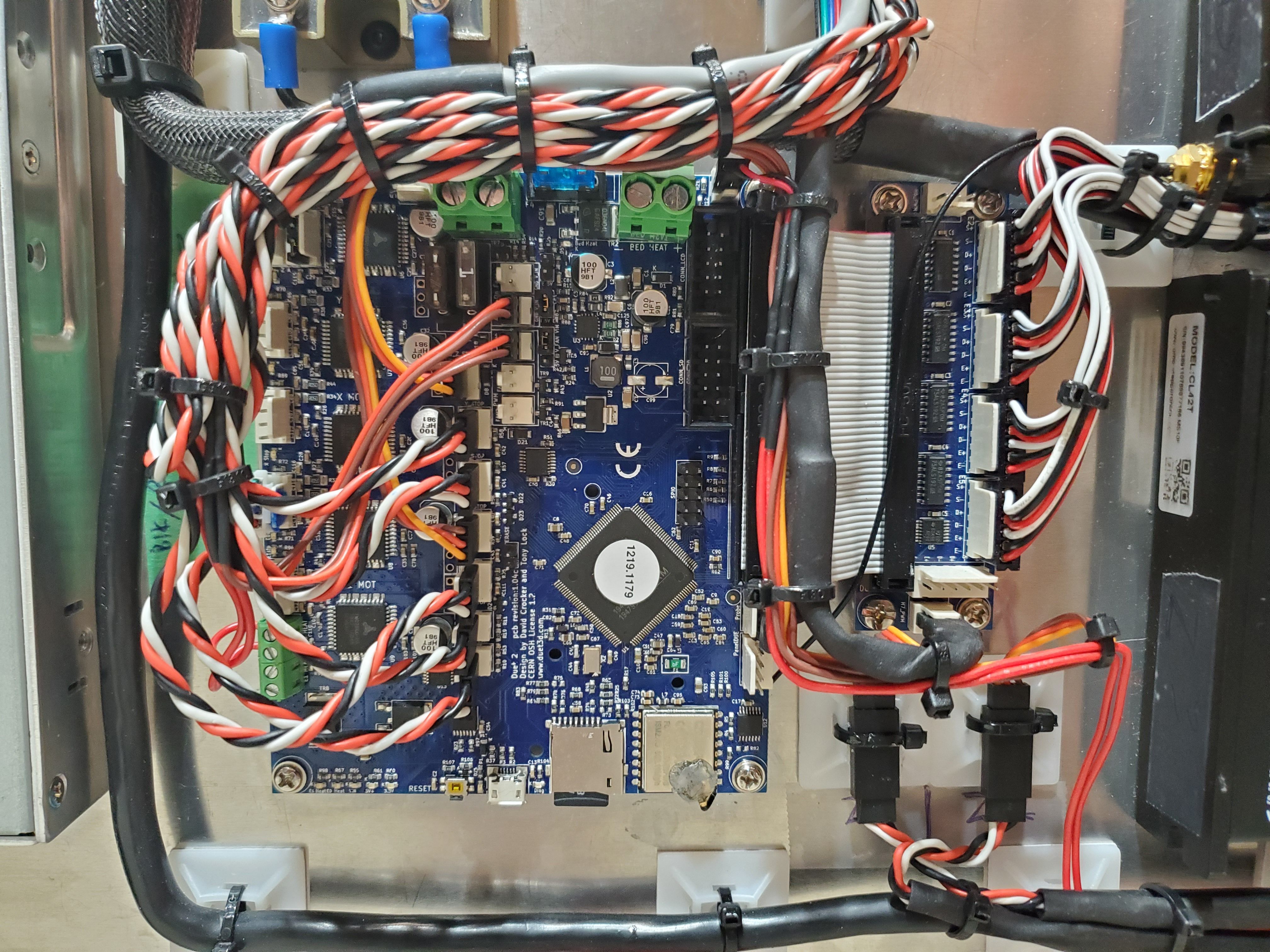
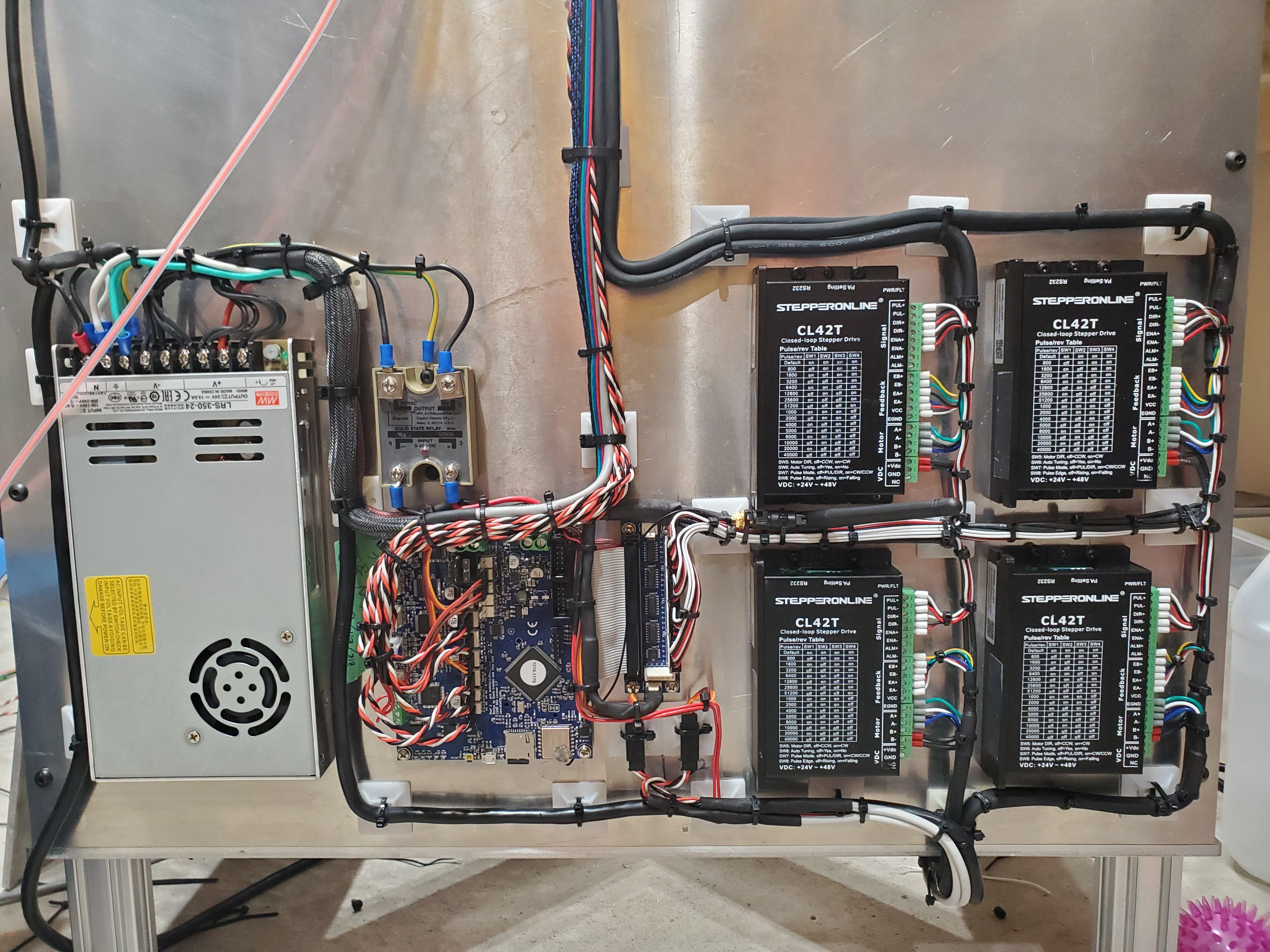
@tracar Can you post the probe section of your RRF2 config.g? And I know you have confirmed the wiring, but could you post a picture of your Duet with the wiring connected so we can check? When you are moving between RRF2 and RRF3, are you changing all the files (homing and deployprobe etc) or just config.g? Or just using separate SD cards?
Ian
-
; Z-Probe
M307 H7 A-1 C-1 D-1 ; disable heater on PWM channel for BLTouch
M950 S0 C"exp.heater7" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X0 Y40.9 Z.445 ; set Z probe trigger value, offset and trigger height
M557 X50:400 Y50:400 S100 ; define mesh grid x50:400 starts at 50, ends at 400 SXX moves by what its set to between points -
@tracar Wiring looks very nice! The only thing I would say is that it would be better to route the endstop and probe wiring further away from the ribbon cable. There have been instances, mainly with the Duex expansion boards, when cables are run over or along the ribbon cable (which is unshielded), it can pick up interference, particularly if you are using Normally Open endstops. The interference is often on the SPI bus, and causes issues with the Duet and Duex communications. I don't know if this issue may effect the driver expansion board too, but it can't hurt moving the wires away from the ribbon cable. I don't know of any change between RRF2 and 3 that may increase the chances of interference; I think it's more likely a configuration issue.
The probe config you posted is still RRF3 (the pins are defined), not the working RRF2 config.
Ian
-
@droftarts
this z probe is what i currently have working in the printer right now . and it fully works with the bl touch.
the signal cables are all shielded, and when i get my 4ch optoisolator the machine will be updated to N/O endstops. and again all shielded cables. but for now they are not physically screwed to the machine for an earth ground till later, after its rebuilt and squared off. the wiring you see is temporary till i get everything installed and working, then everything will be shortend and , as you say some seperation of wires. -
@tracar Okay, if this is the code running with RRF2, then please send
M98 Pconfig.gand I think you'll see errors. M950 is only supported by RRF3, same with the C parameter in M558. Could you please sendM558and post the response?What is the probe deploy command (M280) in your working RRF2 deployprobe.g? Is it
M280 P7 S10 I1? If it is, for RRF3, try inverting the heater 7 output in M950, ieM950 S0 C"!exp.heater7" ; create servo pin 0 for BLTouchIan
-
will test 7 hours from now when i get back from work.
-
M98 PCONFIG.G
HTTP is enabled on port 80
FTP is disabled
TELNET is disabled
Warning: M950 command is not supported
Warning: M950 command is not supported
Warning: M950 command is not supportedM558
Z Probe type 9, input 0, invert no, dive height 5.0mm, probe speed 120mm/min, travel speed 6000mm/min, recovery time 0.00 sec, heaters normal, max taps 1, max diff 0.03M122
=== Diagnostics ===
RepRapFirmware for Duet 2 WiFi/Ethernet version 2.05.1 running on Duet WiFi 1.02 or later
Board ID: 08DLM-996RU-N8PS4-7J9D4-3S86R-KAA3N
Used output buffers: 1 of 24 (9 max)currently on the sd card:
; Z-Probe
M307 H7 A-1 C-1 D-1 ; disable heater on PWM channel for BLTouch
M558 P9 C"^zprobe.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X0 Y40.9 Z.445 ; set Z probe trigger value, offset and trigger height
M557 X50:400 Y50:400 S100 ; define mesh grid x50:400 starts at 50, ends at 400 SXX moves by what its set to between pointsi would have to update to 3xx to test anything else
-
@droftarts said in hbot homes correctly but prints mirrored ,:
current:
M280 P7 S10 :deploy bltouch
M280 P7 S90 I1 ;retract pinalso works the same as :
M280 P7 S90 ;retract pin without I1
and with : instead of ; normal? -
i have printing working as it should, on 2XX
still can not get dual independant z working with bltouch.
-
with it on 3.11
and the servo inverted - M950 S0 C"!exp.heater7" ; create servo pin 0 for BLTouchi get the pin to extend with m401. it will retract with m402
;Alarm Release + Pin UP
M280 P7 S160changed to?
*; Proberetract.g
M280 P7 S90change to M402
; probedeploy.g
M280 P7 S10change to M401
-
figgerd it out must all be P0
-
@tracar said in hbot homes correctly but prints mirrored ,:
figgerd it out must all be P0
The M950 creates a servo number defined by S. So S0 in your case. The M280 P value must correspond to the same servo index number you want to control. So in your case P0.
-
@Phaedrux
im happy,, only 1 item lefthow to configure this as i use external stepper drivers
mine: M584 X6 Y5 Z7:8 U8 E3
; Endstops
M574 X1 S1 P"!xstop" ; configure active-low endstop for high end on X via pin xstop
M574 Y2 S1 P"!ystop" ; configure active-low endstop for high end on Y via pin ystop
M574 Z1 S1 P"!zstop" ; configure active-low endstop for low end on Z via pin zstopneed to change:
M574 Z1 S1 P"zstop+????" ; configure active-high endstops for low end on Z via pins zstop and Ustopim on 3.11 want to make independant z and u homeing with each theit own endstop
; Configuration file for Duet WiFi (firmware version 3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.1.4 on Sun Aug 30 2020 09:00:14 GMT-0600 (Mountain Daylight Time); General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"Duet2" ; set printer name
M669 K1 ; select CoreXY mode; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet; Drives
M569 P5 S1 T5 R1 ; physical drive x goes forwards
M569 P6 S1 T5 R1 ; physical drive y goes forwards
M569 P7 S1 T5 R1 ; physical drive z goes forwards
M569 P8 S1 T5 R1 ; physical drive U goes forwards
M569 P3 S1 ; physical drive extruder goes forwards
M584 X6 Y5 Z7:8 U8 E3 ; set drive mapping
M671 X-50:490 Y330:330 S5 ; x leadscrew position left to right from o,o on y axis , S5 means can adjust up to 5 mm
M350 X16 Y16 Z16 U16 E16 I1 ; configure micro stepping with interpolation
M92 X200.00 Y200.00 Z800.00 U800.00 E138.23 ; set steps per mm
M566 X200.00 Y200.00 Z12.00 U12.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X25000.00 Y25000.00 Z1000.00 U1000.00 E2400.00 ; set maximum speeds (mm/min)
M201 X400.00 Y400.00 Z20.00 U20.00 E400.00 ; set accelerations (mm/s^2)
M906 X300 Y300 Z300 U300 E800 I30 ; set motor currents (mA)
M84 S30 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 U0 S1 ; set axis minima
M208 X440 Y535 Z900 U900 S0 ; set axis maxima; Endstops
M574 X1 S1 P"!xstop" ; configure active-low endstop for high end on X via pin xstop
M574 Y2 S1 P"!ystop" ; configure active-low endstop for high end on Y via pin ystop
M574 Z1 S1 P"!zstop" ; configure active-low endstop for low end on Z via pin zstop; Z-Probe
;M950 S0 C"exp.heater7" ; create servo pin 0 for BLTouch
M950 S0 C"!exp.heater7" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F120 T24000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X0 Y0 Z0.445 ; set Z probe trigger value, offset and trigger height
M557 X70:400 Y180:500 S100 ; define mesh grid; Heaters
M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp
M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"e0temp" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin e0temp
M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit; Fans
M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency
M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on; Tools
M563 P0 S"swiss" D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C; Custom settings are not defined
; Miscellaneous
M575 P1 S1 B57600 ; enable support for PanelDue
M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss -
@tracar said in hbot homes correctly but prints mirrored ,:
M574 Z1 S1 P"zstop+????" ; configure active-high endstops for low end on Z via pins zstop and Ustop
im on 3.11 want to make independant z and u homeing with each theit own endstopWell what endstop are you using for U? e0stop? e1stop? Those are really your only options unless using a duex.
-
@Phaedrux said in hbot homes correctly but prints mirrored ,:
Well what endstop are you using for U? e0stop? e1stop? Those are really your only options unless using a duex
E0
-
M574 Z1 S1 P"zstop+e0stop"
-
This also means you don't need to create a U drive at all. Get rid of all references to U. The Z axis will use drivers 7 and 8 and the endstops will be used to level them without any other config.
You only need a U drive defined if you want manual control of it.
-
got it !!!
; Configuration file for Duet WiFi (firmware version 3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.1.4 on Sun Aug 30 2020 09:00:14 GMT-0600 (Mountain Daylight Time); General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"Duet2" ; set printer name
M669 K1 ; select CoreXY mode; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet; Drives
M569 P5 S1 T5 R1 ; physical drive x goes forwards
M569 P6 S1 T5 R1 ; physical drive y goes forwards
M569 P7 S1 T5 R1 ; physical drive z goes forwards
M569 P8 S1 T5 R1 ; physical drive U goes forwards
M569 P3 S1 ; physical drive extruder goes forwards
M584 X6 Y5 Z7:8 E3 ; set drive mapping
M671 X-50:490 Y330:330 S5 ; x leadscrew position left to right from o,o on y axis , S5 means can adjust up to 5 mm
M350 X16 Y16 Z16 E16 I1 ; configure micro stepping with interpolation
M92 X200.00 Y200.00 Z800.00 E138.23 ; set steps per mm
M566 X200.00 Y200.00 Z12.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X25000.00 Y25000.00 Z1000.00 E2400.00 ; set maximum speeds (mm/min)
M201 X400.00 Y400.00 Z20.00 E400.00 ; set accelerations (mm/s^2)
M906 X300 Y300 Z300 E800 I30 ; set motor currents (mA)
M84 S30 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X440 Y535 Z900 S0 ; set axis maxima; Endstops
M574 X1 S1 P"!xstop" ; configure active-low endstop for high end on X via pin xstop
M574 Y2 S1 P"!ystop" ; configure active-low endstop for high end on Y via pin ystop
M574 Z1 S1 P"!zstop+!e0stop" ; configure active-high endstops for low end on Z via pins zstop and e0stop; Z-Probe
;M950 S0 C"exp.heater7" ; create servo pin 0 for BLTouch
M950 S0 C"!exp.heater7" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F120 T24000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X0 Y0 Z0.445 ; set Z probe trigger value, offset and trigger height
M557 X70:400 Y180:500 S100 ; define mesh grid; Heaters
M308 S0 P"bedtemp" Y"thermistor" T100000 B4138 ; configure sensor 0 as thermistor on pin bedtemp
M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"e0temp" Y"thermistor" T100000 B4138 ; configure sensor 1 as thermistor on pin e0temp
M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit; Fans
M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency
M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on; Tools
M563 P0 S"swiss" D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C; Custom settings are not defined
; Miscellaneous
M575 P1 S1 B57600 ; enable support for PanelDue
M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss