@Phaedrux
I spoke too soon - errors returned, and the connection issue continues to drop out, causing prints to fail.
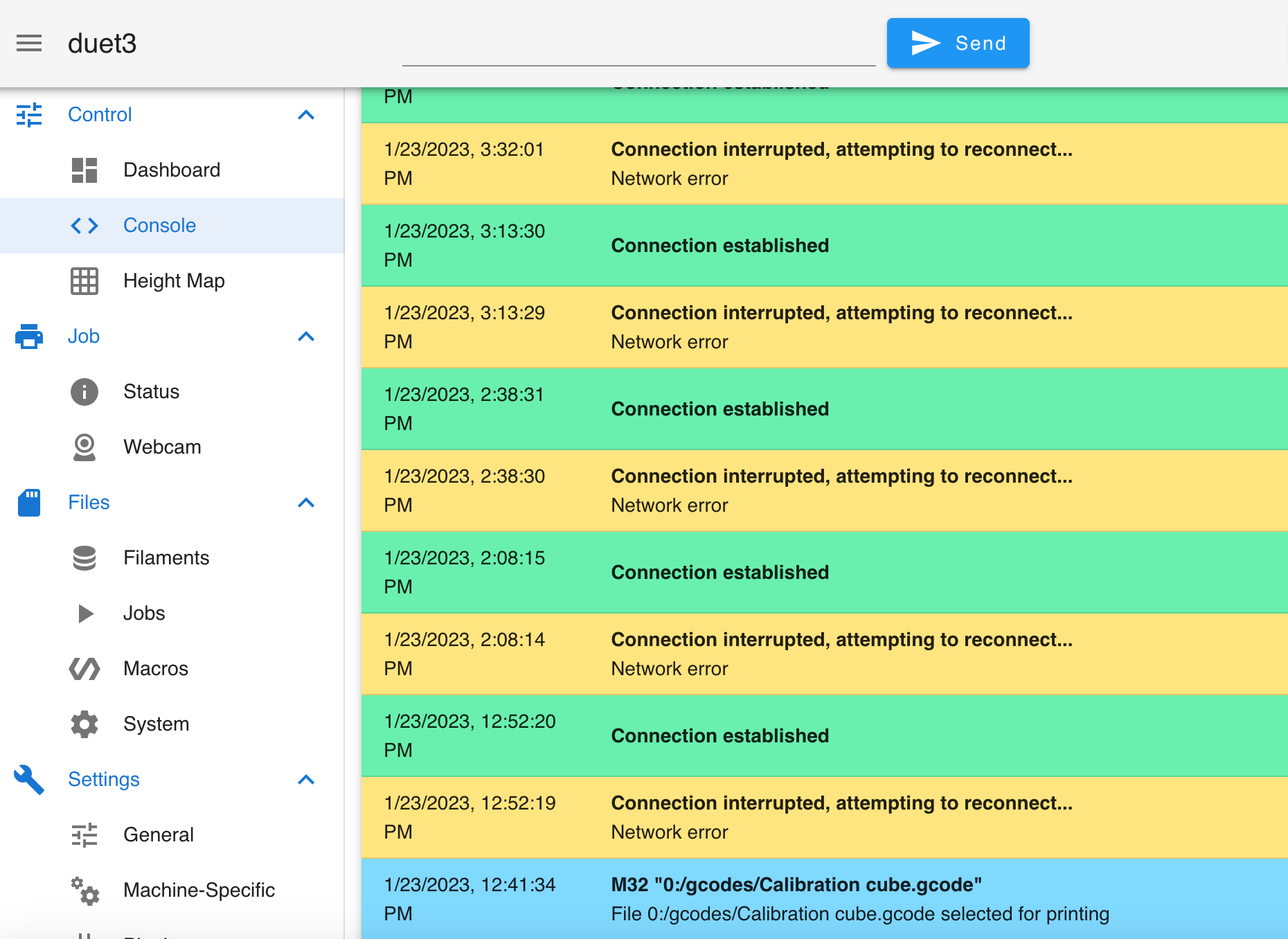
I also followed @jay_s_uk advice and cleaned up the wiring moving everything away from the connecting ribbon cable between the SBC Pi 4 and MB6HC

After a restart M122
m122
=== Diagnostics ===
RepRapFirmware for Duet 3 MB6HC version 3.4.5 (2022-11-30 19:35:23) running on Duet 3 MB6HC v1.01 (SBC mode)
Board ID: 08DJM-9P63L-DJ3T8-6J9DD-3SJ6N-9B7ZA
Used output buffers: 1 of 40 (22 max)
=== RTOS ===
Static ram: 152760
Dynamic ram: 67576 of which 16 recycled
Never used RAM 127104, free system stack 130 words
Tasks: SBC(ready,0.7%,444) HEAT(notifyWait,0.0%,322) Move(notifyWait,0.3%,245) CanReceiv(notifyWait,0.0%,774) CanSender(notifyWait,0.0%,328) CanClock(delaying,0.0%,339) TMC(notifyWait,8.3%,57) MAIN(running,90.5%,923) IDLE(ready,0.2%,30), total 100.0%
Owned mutexes: HTTP(MAIN)
=== Platform ===
Last reset 00:13:43 ago, cause: power up
Last software reset details not available
Error status: 0x00
Aux0 errors 0,0,0
Step timer max interval 135
MCU temperature: min 37.5, current 44.5, max 44.7
Supply voltage: min 24.3, current 24.3, max 24.4, under voltage events: 0, over voltage events: 0, power good: yes
12V rail voltage: min 12.2, current 12.2, max 12.3, under voltage events: 0
Heap OK, handles allocated/used 99/1, heap memory allocated/used/recyclable 2048/156/104, gc cycles 0
Events: 0 queued, 0 completed
Driver 0: standstill, SG min 0, mspos 200, reads 35667, writes 33 timeouts 0
Driver 1: standstill, SG min 0, mspos 1016, reads 35667, writes 33 timeouts 0
Driver 2: standstill, SG min 0, mspos 88, reads 35668, writes 33 timeouts 0
Driver 3: standstill, SG min 0, mspos 120, reads 35668, writes 33 timeouts 0
Driver 4: ok, SG min 0, mspos 433, reads 35672, writes 29 timeouts 0
Driver 5: ok, SG min 0, mspos 472, reads 35672, writes 29 timeouts 0
Date/time: 2023-01-23 08:07:44
Slowest loop: 61.47ms; fastest: 0.04ms
=== Storage ===
Free file entries: 10
SD card 0 not detected, interface speed: 37.5MBytes/sec
SD card longest read time 0.0ms, write time 0.0ms, max retries 0
=== Move ===
DMs created 125, segments created 15, maxWait 262562ms, bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 929, completed 902, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 20], CDDA state 3
=== AuxDDARing ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0
Heater 0 is on, I-accum = 0.0
Heater 1 is on, I-accum = 0.4
=== GCodes ===
Segments left: 1
Movement lock held by null
HTTP* is doing "M122" in state(s) 0
Telnet is idle in state(s) 0
File* is doing "G1 X189.274002 Y170.934006 E0.224800" in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger* is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty
=== CAN ===
Messages queued 8593, received 6595, lost 0, boc 0
Longest wait 1ms for reply type 6042, peak Tx sync delay 10, free buffers 50 (min 48), ts 4118/4117/0
Tx timeouts 0,0,0,0,0,0
=== SBC interface ===
Transfer state: 5, failed transfers: 0, checksum errors: 0
RX/TX seq numbers: 32802/32802
SPI underruns 0, overruns 0
State: 5, disconnects: 0, timeouts: 0 total, 0 by SBC, IAP RAM available 0x2ad48
Buffer RX/TX: 2888/312-4088, open files: 0
=== Duet Control Server ===
Duet Control Server v3.4.5
File /opt/dsf/sd/gcodes/Calibration cube.gcode is selected, processing
File:
Buffered code: G1 X189.274 Y170.934 E0.2248
Buffered code: G1 X189.156 Y171.547 E0.02675
Buffered code: G1 X192.983 Y175.374 E0.23199
Buffered code: G1 X192.983 Y176.105 E0.03135
Buffered code: G1 X189.037 Y172.159 E0.23919
Buffered code: G1 X188.957 Y172.573 E0.01804
Buffered code: G1 X188.926 Y172.779 E0.00896
Buffered code: G1 X192.983 Y176.836 E0.24594
Buffered code: G1 X192.983 Y177.567 E0.03135
Buffered code: G1 X188.83 Y173.415 E0.25176
Buffered code: G1 X188.734 Y174.05 E0.02754
Buffered code: G1 X192.983 Y178.299 E0.25757
Buffered code: G1 X192.983 Y179.03 E0.03135
Buffered code: G1 X188.645 Y174.692 E0.26295
Buffered code: G1 X188.575 Y175.353 E0.02848
Buffered code: G1 X192.983 Y179.761 E0.26723
Buffered code: G1 X192.983 Y180.492 E0.03135
Buffered code: G1 X188.504 Y176.014 E0.27151
Buffered code: G1 X188.465 Y176.378 E0.01569
Buffered code: G1 X188.447 Y176.688 E0.01332
Buffered code: G1 X192.983 Y181.224 E0.27497
Buffered code: G1 X192.983 Y181.955 E0.03135
Buffered code: G1 X188.406 Y177.379 E0.27742
Buffered code: G1 X188.385 Y177.743 E0.01566
Buffered code: G1 X188.389 Y178.093 E0.01497
Buffered code: G1 X192.983 Y182.686 E0.27848
Buffered code: G1 X192.983 Y183.417 E0.03135
Buffered code: G1 X188.397 Y178.832 E0.27798
Buffered code: G1 X188.4 Y179.044 E0.00906
Buffered code: G1 X188.34 Y179.506 E0.02
Buffered code: G1 X192.983 Y184.149 E0.28144
Buffered code: G1 X192.983 Y184.88 E0.03135
==> 1536 bytes
Code buffer space: 2576
Configured SPI speed: 8000000Hz, TfrRdy pin glitches: 0
Full transfers per second: 35.22, max time between full transfers: 110.3ms, max pin wait times: 55.8ms/13.2ms
Codes per second: 1.88
Maximum length of RX/TX data transfers: 2920/1248
PM M115
FIRMWARE_NAME: RepRapFirmware for Duet 3 MB6HC FIRMWARE_VERSION: 3.4.5 ELECTRONICS: Duet 3 MB6HC v1.01 FIRMWARE_DATE: 2022-11-30 19:35:23
M115 B1
Duet EXP3HC rev 1.01 or earlier firmware version 3.4.4 (2022-10-14 11:45:56)