Which direction are the pins? Left/Right or Top/Bottom if you view the connector from the bottom and the connector pin is at the top?
Posts made by bberger
-
RE: How do I remove the pin of the 6-pin Molex connector?posted in Smart effector for delta printers
-
How do I remove the pin of the 6-pin Molex connector?posted in Smart effector for delta printers
How do I get the pin out of this mess?



-
RE: Orbiter 2 extruder mounting for Smart effector with Magball armsposted in Smart effector for delta printers
@adrian52 said in Orbiter 2 extruder mounting for Smart effector with Magball arms:
@fred-y Its 1.5mm.
You do need to be able to rotate your hot end - would be difficult with a v6 where the heater block really has to be aligned with the part cooling fanIt actually depends. The earlier versions that shipped with the metal nut had a fine pitch..
-
RE: Orbiter 2 extruder mounting for Smart effector with Magball armsposted in Smart effector for delta printers
@fred-y though about exactly that multiple times. Problem is that it's pointless with 55mm magball spacing as you need some real nasty vertical offset and tilt to jot collide with the arms which then puts a lot of direct force onto the hotend itself.
-
RE: Orbiter 2 extruder mounting for Smart effector with Magball armsposted in Smart effector for delta printers
@fred-y I don't have a solution that I'm happy to share tbh (80mm rod spacing adapter + a pain in the butt mount for the LGX lite).
That LGX Lite is a pain to mate to the smart effector and any adapter I had thought of. The pain of a need to screw them from the bottom is real.
BUT: on the SR I suspect you could probably get away with this without losing print volume:
https://www.thingiverse.com/thing:5255358It doesn't print really well though and needs supports.
-
RE: Best Choice of Motor for a Delta Printerposted in Duet Hardware and wiring
@ignacmc the needle bearings suggested here are super thin though.
But yes, with the suggested tension of Gates for their belts in linear positioning applications we're at the upper end of what Nema 17 bearings usually are rated for. On my Moon's it just barely within "extended" spec (they're in the rated "can be up to this load, but expect reduced bearing life).
Haven't looked up the Wantai specs though. I don't think that they'll be a problem in our application. At least not for the lifetime of the printer unless it's maybe running 24/7 in a farm.
The thing with pillow blocks / bracings is: they need to be accurate or they will introduce crooked sideload themselves on the motor bearings.
Has anyone been able to find the Wantai with a D-Shaft and connectors? That's the primary reason why I have been to lazy to switch back to them.. I know they exist as they can be ordered to spec that way, but haven't seen any retailer carrying them

-
RE: Best Choice of Motor for a Delta Printerposted in Duet Hardware and wiring
@ignacmc I'd happily take the F360 files
")
-
RE: Orbiter 2 extruder mounting for Smart effector with Magball armsposted in Smart effector for delta printers
I've settled on a solution for me now. Still undecided if I want to go back to the flying orbiter v2 though as the input shaping graphs don't look too bad, but compared to the flying extruder don't look too good either.. and I'm kinda into getting prints done as fast as I can:
Direct Drive Orbiter v2 on 80mm adapter:
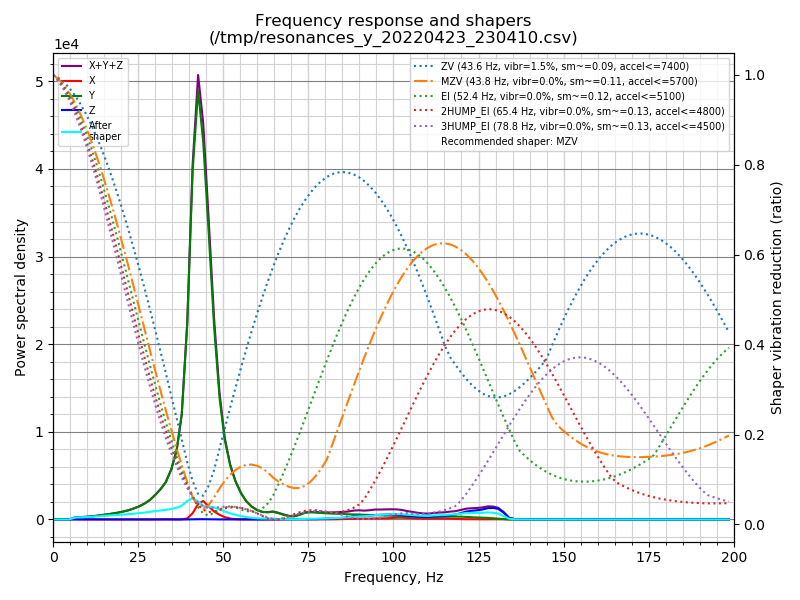
Flying Orbiter v2 on stock 55mm Smart Effector:
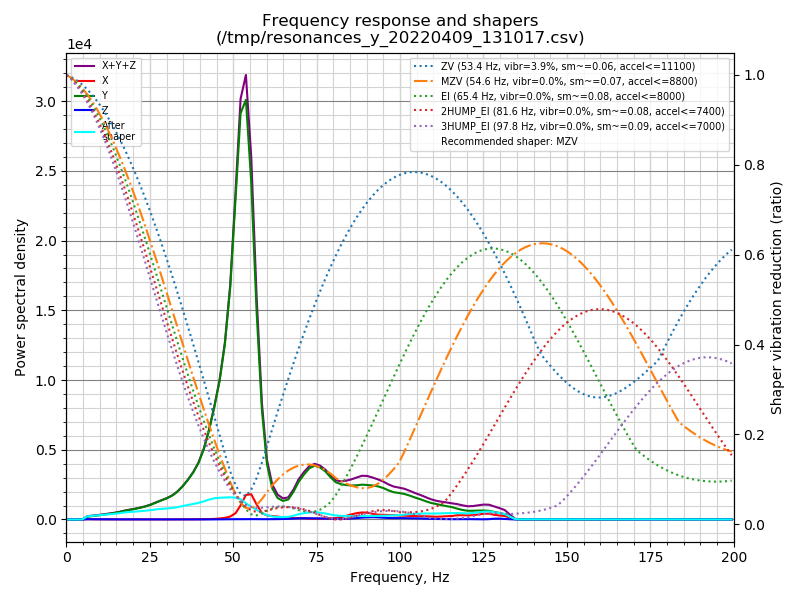
Flying Orbiter v2 on 80mm Adapter for reference what the 80mm adapter alone does to my input shaper graph:
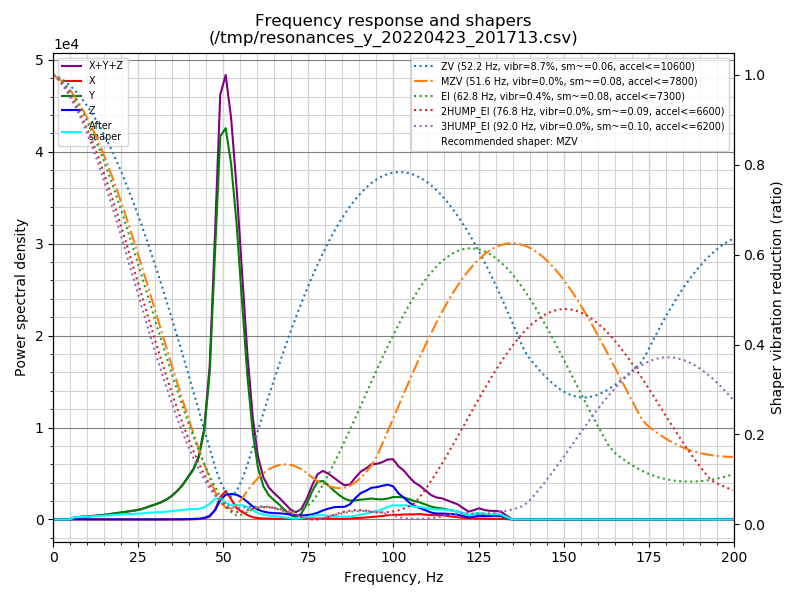
//Edit: the graphs only tell half the truth. I can't even get close to max suggested accelerations on the direct drive without having motion artifacts (no ringing, but "smoothing" from hell). Need to go down to about 2.5k to have comparable print quality to the flying extruder on 8.5k acceleration.
I'll be reverting back and just get a second printer for printing flexibles.
-
RE: Best Choice of Motor for a Delta Printerposted in Duet Hardware and wiring
@ignacmc don't forget to share you enclosure please
Still trying to get away from the parabolic resonance hell the CarstenD enclosure gives me (it also is too narrow for my cooling solution).I know Chris W. in the Advanced Predator group has designed a flat enclosure with more spacing from the same panel sizes that Carsten used, but haven't gotten around to print the parts yet..
-
RE: Smart Effector v2/v3 - maximum operating Temperature?posted in Smart effector for delta printers
Thank you for the quick response! Sounds like ~50-60C would be the reasonable target then.
-
Smart Effector v2/v3 - maximum operating Temperature?posted in Smart effector for delta printers
Can't find any infos on this: what's the maximum operating temp for the smart effector (e.g. in a heated chamber). Would 60-80C still be ok?
-
RE: Delta: 0.9° vs 1.8° with 2:1 reduction?posted in 3D Printing General Chat
@o_lampe I'm just spinning ideas in my head and wanted to check if they're complete nonsense or possibly have merit.
And yes, the idea would be timing belt + pulley reduction.
It's less about absolute speed for me, I'm actually in a happy place with my current 0.9° delta on 24V and cooling becomes an issue before I can outrun the motors. My gut however tells me that 1.5m long 6mm belts might be a limiting factor and I'm worried about motor bearing life when thinking about tightening 9mm or 12mm belts to spec.
So the idea behind my thinking is:
- does it make sense to use the additional grunt from 1.8° steppers to use a reduction as I feel the need to reduce the load on the bearings anyways
- does a system with 2 belts eventually help to smoothen out motion and void some of the resonances? From my understanding steppers are more prone to get caught up in resonant frequencies if driven at low speed. Which is true on a delta especially in the center of the build area - where also accuracy and error are the worst. A 3:1 reduction would give me (at least in theory?) a 33% improvement in resolution and 33% less positioning errors compared to a 0.9° stepper directly driving the carriages while still being on-par with the 0.9 steppers speed wise.
At least that's what I come up with comparing:
- LDO-42STH48-2504AC (very low inductance, 1.8deg steppers)
vs - Moon's MS17HA6P4200 (my current steppers)
Maybe there's a unicorn 0.9 stepper I haven't found yet that makes all my thinking obsolete. Maybe a reduction system even is a more valid playground for servo motors (clearpath, odrive, ..) as it possibly eliminates most of the cogging issues at low speed?
-
RE: CPAP blower fan?posted in Duet Hardware and wiring
@mrehorstdmd Simon is going hardcore for speed and doing speedruns (talking 100mm³/s+ flowrate) - hence the CPAP and his side cooling ducts.
I'd say the only thing to be cautious about is the input voltage tolerance of the control board. 3.3V vs 5V.
-
Delta: 0.9° vs 1.8° with 2:1 reduction?posted in 3D Printing General Chat
I'm planning a delta build in an either hexagonal or rectangular frame / chamber which gives me some room for the motors. I'd like to use Nema17 steppers and I'm planning on having them offset with either a coupler or a timing belt to reduce the stress on the bearings.
With 48V solutions and low inductance 1.8 motors now available I'm trying to figure out if it were a downside or an upside to run 1.8° motors with either 2:1 or 3:1 reduction?
I'm running 0.9 deg motors on my current delta and can easily hit my desired speeds - I've seen videos on CoreXY builds where the 1.8 motors are capable of 3+ times more speed and acceleration than their 0.9 counterparts - hence my thinking 2:1 reduction would be the same and 3:1 might even be a nice gain in resolution and error on a delta build?
-
RE: New FLSUN Super Racer, ideas for upgrades?posted in General Discussion
@fred-y said in New FLSUN Super Racer, ideas for upgrades?:
@oliof The Smart Effector can work with Klipper, I installed this firmware on my Predator for a few months to test it but I rolled back to RRF during be beta of 3.4 for Input Shaping.
I don't think it's possible to adjust the sensibility.
That's been solved by now. It's merged in the latest Klipper.
-
RE: Best Choice of Motor for a Delta Printerposted in Duet Hardware and wiring
@ignacmc just disable stealthchop and make sure you have enabled interpolation.
Would you mind maybe recording a small video clip of those noises? It would help us judge if that's something to be expected or if it's out of the ordinary.
If you're travelling from one edge of the bed to the other edge of the bed with 300+ mm/s then sure, they'll whine. But they should be near silent on anything in a radius of ~10cm in the middle of the bed and practically dead silent near the center.
What really (really) helps the noise on the Predator are stepper dampers. Especially of you have rigidly mounted rails. And to be honest I didn't really notice a difference in quality then I removed them some weeks ago, but that was before I was able to go for crazy accelerations and speed thanks to Input Shaping.
What also contributed to a LOT of nasty noise was the top electronics panel. Make sure you've got that strapped down snuggly without overtightening it. That thing has a tendency to rattle.
Also, should you happen to have an enclosure (maybe the famous one from CarstenD) - that's a bad (BAD) idea for noise. Those curved panels at 120deg angle are basically reflectors throwing sound waves from all directions to the middle of the chamber where they basically "explode").
Maybe the noise alternatively comes from bad bearings at the idlers or the belt rubbing against something? Millions of possible reasons and I still doubt the motors are the main contributor.
-
RE: Best Choice of Motor for a Delta Printerposted in Duet Hardware and wiring
@ignacmc said in Best Choice of Motor for a Delta Printer:
... I do have some LDO 42STH48-1684MAC at hand whose performance seems in the middle between Wantai and Moons (1.65 Ohm / 2.8 mH)...should I use them or ordering the Wantai will worth the money and time?
Keep the LDO. Should be good enough.
What exactly is the problem you're experiencing though? Noise? Layer shifts? Artefacts?
-
RE: Best Choice of Motor for a Delta Printerposted in Duet Hardware and wiring
@ignacmc haha, looks like a similar love story to delta kinematics like mine.
Btw. I'm running an Orbiter direct drive extruder too, but on magballs and an 80mm rod spacing adapter.. Was experimenting a LOT lately and also thought about trying out the MPJet as I'm slowly collecting enough parts to build a second delta from all my experimentation iver the past 2 years..
I don't have my RRF config anymore as I switched to another FW recently for experimentation's sake but I think I have most values still memorized - so ask away if you want to know specifics.
I do have to say that I am on 20T pulleys as I didn't get any toothed 16T idlers with bearings back then - so that's potentially a 25% load and speed difference. I suspect that with 16T pulleys my speeds would be more limited as I'm not sure the need for 25% higher revs could be offset by lowering the current enough to compensate for back-EMF.. I suspect that the Wantai would be fine and possibly also the smaller Moon's (P4100/P4150 opposed to the P4200) but I'm also pretty sure I'd have to sacrifice top speed with the P4200.
-
RE: Best Choice of Motor for a Delta Printerposted in Duet Hardware and wiring
Wantai 42BYGHM810
Moon's MS17HA6P4200You'll want to get as much mechanical precision as you can get from a delta. It's a completely different kinematic than a cartesian/corexy and errors/inaccuracies in the motion system get multiplied across the cartesian plane.
If you're still slinging around that massive aluminium effector with massive carriages rolling on non-flat and potentially bumpy extrusions you'll be much better off with improving there compared to new motors. Deltas (actually almost all printers) work best when they don't have sling around massive chunks of weight.
As for your problems: what exactly are you experiencing problems with? Could it be that you overtightened the belts when re-assembling? Maybe your carriages aren't properly tight or too tight after reassembly. Maybe a pulley got loose. Or maybe you just chose a motor that's too weak throwing around the ginormous weight of the stock effector and carriages (in that case 1.8deg motors with more oomph might actually help, but then you could just reinstall the stock motors) and improve in other areas for the same budget with better results. Even the dirt cheapest linear rails you get from china are potentially and exponentially bigger improvement than new motors.
And for the Voron reference: they aren't. They're built to be enclosed for ABS printing first and to be stylish second. They sling around too much unnecessary weight and plastic for them to be speed monsters. (they are interesting machines though!) Have a look at VzBot, Hevort for coreXY woth speed in mind. Or at the Annex printers if we're talking quadrep kinematics.
//Edit: just saw in your signature that you're using the smart effector already, so that's down a ton of weight. Please explain your issues so we (or at least I) can do a better job at helping
-
RE: Best Choice of Motor for a Delta Printerposted in Duet Hardware and wiring
@ignacmc I' argue that StealthChop and high speed are mutually exclusive. No matter 1.8 or 0.9deg steppers.
I've had Wantai 0.9° steppers and now Moon's 0.9° steppers in my frankensteined Predator. I would recommend the Wantai as they're way more silent, have less inductance, rotor inertia and cost about 1/3rd or less. Next time I tear apart my towers I'll revert to the Wantai and use the Moon's for another project.
I'd highly recommend 0.9 steppers over 1.8 steppers on a Delta.
As you don't seem to care too much about precision as you do for noise I'd also say add 3 stepper dampers and you'll have a virtually silent printer (depending on fans and the rails used).
Not sure what your speed target is but I can do a 10 minute speed benchy just fine on my 0.9° moon's and a ~23 minute benchy that actually looks quality without flaws.
I usually print at 500mm/s travel, 8k accel and 200/400 (perimeter/infill) just fine. 500@10k is about the limit though on the outer edges of the bed. Anything near the center of the bed can probably do twice the quoted values.
You can always try to feed less current to your motors to make them more quiet which also helps back EMF.