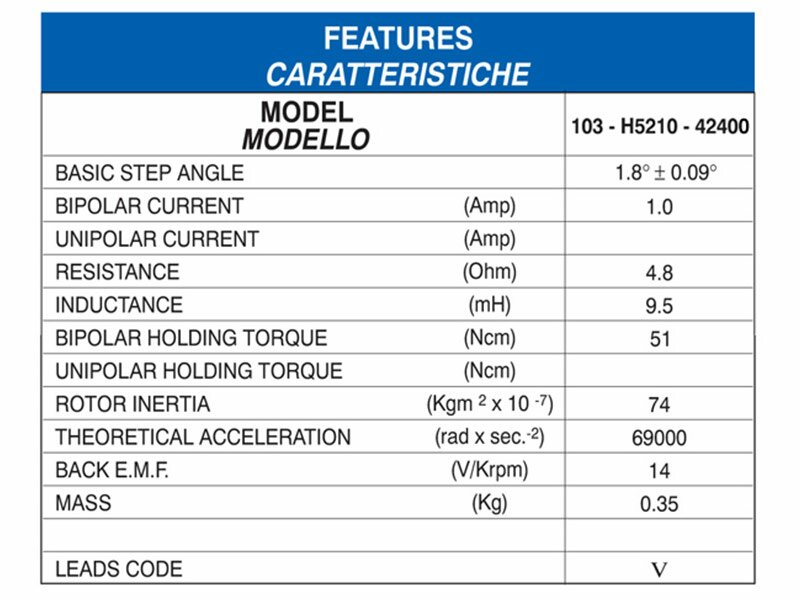
Hello! I am using the 03-H5210-4240 / NEMA17 / Flansch 42mm / 1A / 51 Ncm stepper motors and would now like to create them in config.g. However, I do not know which values I have to enter. Can someone please help me with this?
Posts made by jason0607
-
Config.g Stepper Motorposted in Config Tool
-
RE: Crying stepper motorsposted in Duet Hardware and wiring
@droftarts
What are normal values? I can only move my stepper motor up to about 15mm/s. -
RE: Crying stepper motorsposted in Duet Hardware and wiring
@rushmere3d I only have a Duet3Mini5+ Ethernet Board and the steppermotor 103-H5210-4240 / NEMA17 / Flansch 42mm / 1A / 51 Ncm
-
RE: Crying stepper motorsposted in Duet Hardware and wiring
@rushmere3d M98 P"config.g"
HTTP is enabled on port 80
FTP is disabled
TELNET is disabled
Error: Failed to initialise thermocouple: bad response from sensor
Warning: Sensor number 0 has not been defined -
RE: Crying stepper motorsposted in Duet Hardware and wiring
@Rushmere3D What would be the settings for my motor?
-
RE: Crying stepper motorsposted in Duet Hardware and wiring
@rushmere3d Error: M98: control character in string
-
RE: Crying stepper motorsposted in Duet Hardware and wiring
@rushmere3d
=== Diagnostics ===
RepRapFirmware for Duet 3 Mini 5+ version 3.4.1 (2022-06-01 21:06:56) running on Duet 3 Mini5plus Ethernet (standalone mode)
Board ID: 0KSJD-0296U-D65J0-40KMS-K803Z-H4BUF
Used output buffers: 3 of 40 (14 max)
=== RTOS ===
Static ram: 103684
Dynamic ram: 104352 of which 100 recycled
Never used RAM 33504, free system stack 182 words
Tasks: NETWORK(ready,25.6%,244) ETHERNET(notifyWait,0.2%,576) HEAT(notifyWait,0.0%,374) Move(notifyWait,0.0%,290) CanReceiv(notifyWait,0.0%,942) CanSender(notifyWait,0.0%,372) CanClock(delaying,0.0%,339) TMC(notifyWait,0.7%,81) MAIN(running,71.8%,510) IDLE(ready,1.0%,29) AIN(delaying,0.8%,264), total 100.0%
Owned mutexes:
=== Platform ===
Last reset 00:00:56 ago, cause: software
Last software reset at 2022-08-16 09:30, reason: User, GCodes spinning, available RAM 33520, slot 1
Software reset code 0x0003 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x00000000 BFAR 0xe000ed38 SP 0x00000000 Task MAIN Freestk 0 n/a
Error status: 0x00
MCU revision 3, ADC conversions started 56285, completed 56285, timed out 0, errs 0
Step timer max interval 1487
MCU temperature: min 23.9, current 24.8, max 24.8
Supply voltage: min 24.0, current 24.0, max 24.0, under voltage events: 0, over voltage events: 0, power good: yes
Heap OK, handles allocated/used 0/0, heap memory allocated/used/recyclable 0/0/0, gc cycles 0
Events: 2 queued, 2 completed
Driver 0: standstill, SG min 0, read errors 0, write errors 1, ifcnt 21, reads 2937, writes 11, timeouts 0, DMA errors 0, CC errors 0
Driver 1: standstill, SG min 0, read errors 0, write errors 1, ifcnt 27, reads 2935, writes 13, timeouts 0, DMA errors 0, CC errors 0
Driver 2: standstill, SG min 0, read errors 0, write errors 1, ifcnt 27, reads 2934, writes 13, timeouts 0, DMA errors 0, CC errors 0
Driver 3: standstill, SG min 0, read errors 0, write errors 1, ifcnt 21, reads 2936, writes 11, timeouts 0, DMA errors 0, CC errors 0
Driver 4: standstill, SG min 0, read errors 0, write errors 1, ifcnt 19, reads 2939, writes 9, timeouts 0, DMA errors 0, CC errors 0
Driver 5: not present
Driver 6: not present
Date/time: 2022-08-16 09:31:34
Cache data hit count 97077235
Slowest loop: 299.88ms; fastest: 0.13ms
=== Storage ===
Free file entries: 10
SD card 0 detected, interface speed: 22.5MBytes/sec
SD card longest read time 3.4ms, write time 11.7ms, max retries 0
=== Move ===
DMs created 83, segments created 3, maxWait 40644ms, bed compensation in use: none, comp offset 0.000
=== MainDDARing ===
Scheduled moves 6, completed 6, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 1], CDDA state -1
=== AuxDDARing ===
Scheduled moves 0, completed 0, hiccups 0, stepErrors 0, LaErrors 0, Underruns [0, 0, 0], CDDA state -1
=== Heat ===
Bed heaters 0 -1 -1 -1, chamber heaters -1 -1 -1 -1, ordering errs 0
=== GCodes ===
Segments left: 0
Movement lock held by null
HTTP is idle in state(s) 0
Telnet is idle in state(s) 0
File is idle in state(s) 0
USB is idle in state(s) 0
Aux is idle in state(s) 0
Trigger is idle in state(s) 0
Queue is idle in state(s) 0
LCD is idle in state(s) 0
SBC is idle in state(s) 0
Daemon is idle in state(s) 0
Aux2 is idle in state(s) 0
Autopause is idle in state(s) 0
Code queue is empty
=== CAN ===
Messages queued 282, received 0, lost 0, boc 0
Longest wait 0ms for reply type 0, peak Tx sync delay 0, free buffers 18 (min 18), ts 282/0/0
Tx timeouts 0,0,281,0,0,0 last cancelled message type 30 dest 127
=== Network ===
Slowest loop: 101.62ms; fastest: 0.03ms
Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions
HTTP sessions: 1 of 8- Ethernet -
State: active
Error counts: 0 0 0 0 0
Socket states: 5 2 2 2 2 0 0 0
- Ethernet -
-
RE: Crying stepper motorsposted in Duet Hardware and wiring
@jason0607 Yes they are connected correctly
-
RE: Crying stepper motorsposted in Duet Hardware and wiring
@Rushmere3D
Now the motor is just as loud but moves slower -
RE: Crying stepper motorsposted in Duet Hardware and wiring
@Rushmere3D
; General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"My Printer" ; set printer name; Network
M552 P169.254.179.25 S1 ; enable network and set IP address
M553 P255.255.0.0 ; set netmask
M554 P192.168.150.1 ; set gateway
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet; Drives
M569 P0.0 S1 ; physical drive 0.0 goes forwards
M569 P0.1 S1 ; physical drive 0.1 goes forwards
M569 P0.2 S1 ; physical drive 0.2 goes forwards
M569 P0.3 S1 ; physical drive 0.3 goes forwards
M584 X0.0 Y0.1 Z0.2 E0.3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z400.00 E420.00 ; set steps per mm
M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X1000.00 Y1000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X200.00 Y200.00 Z20.00 E250.00 ; set accelerations (mm/s^2)
M906 X800 Y800 Z800 E800 I60 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X230 Y210 Z200 S0 ; set axis maxima; Endstops
M574 X1 S1 P"io1.in" ; configure switch-type (e.g. microswitch) endstop for low end on X via pin io1.in
M574 Y2 S1 P"io2.in" ; configure switch-type (e.g. microswitch) endstop for high end on Y via pin io2.in
M574 Z1 S2 ; configure Z-probe endstop for low end on Z; Z-Probe
;M950 S0 C"io3.out" ; create servo pin 0 for BLTouch
;M558 P9 C"temp2" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
;G31 P500 X25 Y0 Z2.5 ; set Z probe trigger value, offset and trigger height
;M557 X15:215 Y15:195 S20 ; define mesh grid; Heaters
M308 S0 P"spi.cs1" Y"thermocouple-max31856" A"Thermocouple" K"K" F50 ; configure sensor 0 as typ k thermocouple on pin spi.cs1 (TC0)
M950 H0 C"out1" T0 ; create bed heater output on out1 and map it to sensor 0
M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S280 ; set temperature limit for heater 0 to 280C
;M308 S1 P"1.spi.cs1" Y"thermocouple-max31856" K"S"; define temperature sensor number 1 as a Type thermocouple on the first port of a temperature daughter board plugged into the expansion board with CAN bus address 3.
;M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1
;M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
;M143 H1 S280;Fans
M950 F0 C"out3" Q500 ; create fan 0 on pin out3 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M950 F1 C"out4" Q500 ; create fan 1 on pin out4 and set its frequency
M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on; Tools
;M563 P0 D0 H1 F0 ; define tool 0
;G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
;G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C; Custom settings are not defined
; Miscellaneous
M501 ; load saved parameters from non-volatile memory
M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss
T0 ; select first tool; Configuring steps and speeds
;M584 X0 Y1 Z2:3 E4:5 ; set drive mapping;M350 X16 Y16 Z16 E16:16 I1 ; configure microstepping with interpolation
;M92 X80.00 Y80.00 Z400.00 E420.00:420.00 ; set steps per mm;Setting motor speeds and accelerations
;M584 X0 Y1 Z2:3 E4:5 ; set drive mapping;M566 X900.00 Y900.00 Z60.00 E120.00:120.00 ; set maximum instantaneous speed changes (mm/min)
;M203 X500.00 Y500.00 Z180.00 E1200.00:1200.00 ; set maximum speeds (mm/min)
;M201 X69000.00 Y69000.00 Z20.00 E250.00:250 ; set accelerations (mm/s^2);Setting motor currents
;M584 X0 Y1 Z2:3 E4:5 ; set drive mapping
;M906 X400 Y800 Z800 E800:800 I30 ; set motor currents (mA) and motor idle factor in per cent -
RE: Crying stepper motorsposted in Duet Hardware and wiring
Motor: / 103-H5210-4240 / NEMA17 / Flansch 42mm / 1A / 51 Ncm
-
RE: Crying stepper motorsposted in Duet Hardware and wiring
; General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"My Printer" ; set printer name; Network
M552 P169.254.179.25 S1 ; enable network and set IP address
M553 P255.255.0.0 ; set netmask
M554 P192.168.150.1 ; set gateway
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet; Drives
M569 P0.0 S1 ; physical drive 0.0 goes forwards
M569 P0.1 S1 ; physical drive 0.1 goes forwards
M569 P0.2 S1 ; physical drive 0.2 goes forwards
M569 P0.3 S1 ; physical drive 0.3 goes forwards
M584 X0.0 Y0.1 Z0.2 E0.3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z400.00 E420.00 ; set steps per mm
M566 X900.00 Y900.00 Z60.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X1000.00 Y1000.00 Z180.00 E1200.00 ; set maximum speeds (mm/min)
M201 X200.00 Y200.00 Z20.00 E250.00 ; set accelerations (mm/s^2)
M906 X200 Y200 Z200 E200 I60 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X0 Y0 Z0 S1 ; set axis minima
M208 X230 Y210 Z200 S0 ; set axis maxima; Endstops
M574 X1 S1 P"io1.in" ; configure switch-type (e.g. microswitch) endstop for low end on X via pin io1.in
M574 Y2 S1 P"io2.in" ; configure switch-type (e.g. microswitch) endstop for high end on Y via pin io2.in
M574 Z1 S2 ; configure Z-probe endstop for low end on Z; Z-Probe
;M950 S0 C"io3.out" ; create servo pin 0 for BLTouch
;M558 P9 C"temp2" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
;G31 P500 X25 Y0 Z2.5 ; set Z probe trigger value, offset and trigger height
;M557 X15:215 Y15:195 S20 ; define mesh grid; Heaters
M308 S0 P"spi.cs1" Y"thermocouple-max31856" A"Thermocouple" K"K" F50 ; configure sensor 0 as typ k thermocouple on pin spi.cs1 (TC0)
M950 H0 C"out1" T0 ; create bed heater output on out1 and map it to sensor 0
M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S280 ; set temperature limit for heater 0 to 280C
;M308 S1 P"1.spi.cs1" Y"thermocouple-max31856" K"S"; define temperature sensor number 1 as a Type thermocouple on the first port of a temperature daughter board plugged into the expansion board with CAN bus address 3.
;M950 H1 C"out1" T1 ; create nozzle heater output on out1 and map it to sensor 1
;M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
;M143 H1 S280;Fans
M950 F0 C"out3" Q500 ; create fan 0 on pin out3 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off
M950 F1 C"out4" Q500 ; create fan 1 on pin out4 and set its frequency
M106 P1 S1 H1 T45 ; set fan 1 value. Thermostatic control is turned on; Tools
;M563 P0 D0 H1 F0 ; define tool 0
;G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
;G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C; Custom settings are not defined
; Miscellaneous
M501 ; load saved parameters from non-volatile memory
M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss
T0 ; select first tool; Configuring steps and speeds
M584 X0 Y1 Z2:3 E4:5 ; set drive mappingM350 X16 Y16 Z16 E16:16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z400.00 E420.00:420.00 ; set steps per mm;Setting motor speeds and accelerations
M584 X0 Y1 Z2:3 E4:5 ; set drive mappingM566 X900.00 Y900.00 Z60.00 E120.00:120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X500.00 Y500.00 Z180.00 E1200.00:1200.00 ; set maximum speeds (mm/min)
M201 X69000.00 Y69000.00 Z20.00 E250.00:250 ; set accelerations (mm/s^2);Setting motor currents
;M584 X0 Y1 Z2:3 E4:5 ; set drive mapping
;M906 X400 Y800 Z800 E800:800 I30 ; set motor currents (mA) and motor idle factor in per cent -
Crying stepper motorsposted in Duet Hardware and wiring
Hello!
I have connected stepper motors, but they "cry" when I start them up on the Duet3Mini5+. Is there a solution for this? -
Extruder Bondtech LGXposted in Duet Hardware and wiring
Hello!
Can someone please explain to me how to install and configure an extruder (Bondtech LGX) on a Duet3Mini 5+? -
Installation Extruder Bondtech LGXposted in Documentation
Hello!
Can someone please explain to me how to install and configure an extruder (Bondtech LGX) on a Duet3Mini 5+?