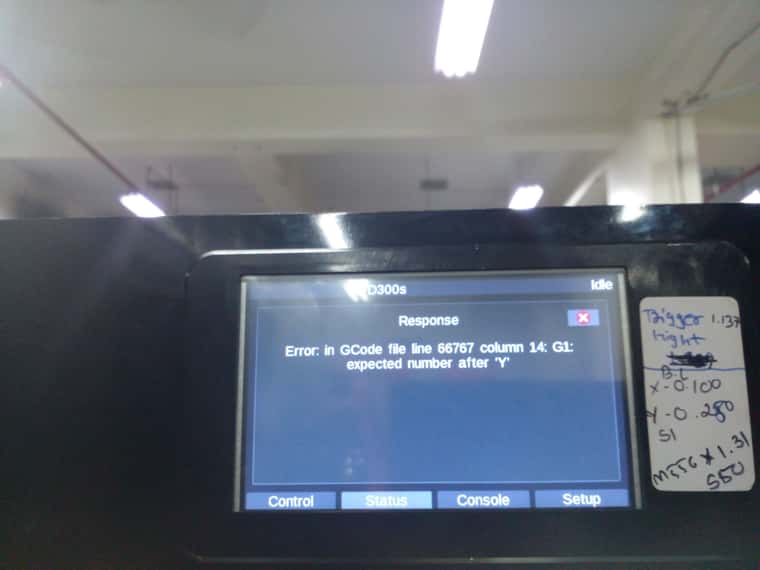
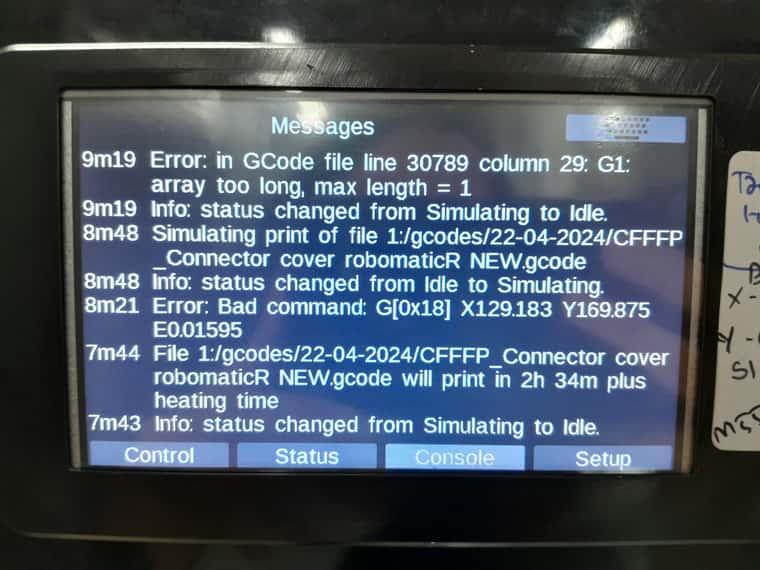
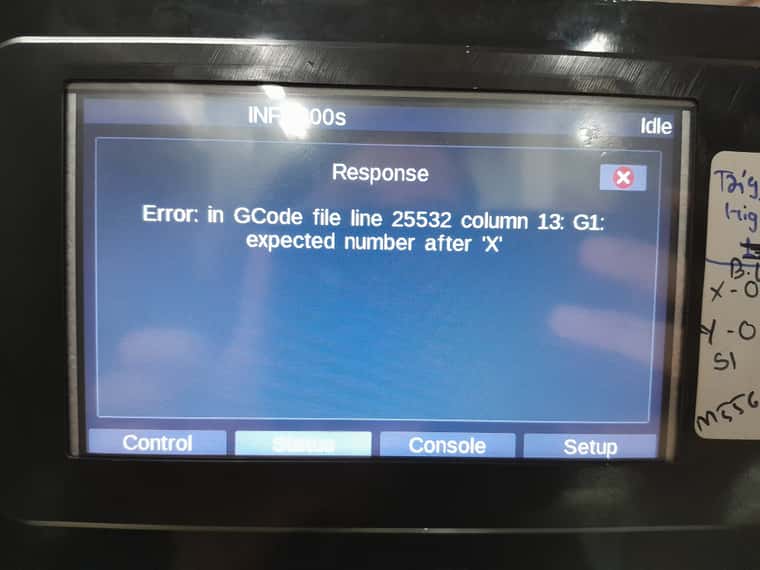
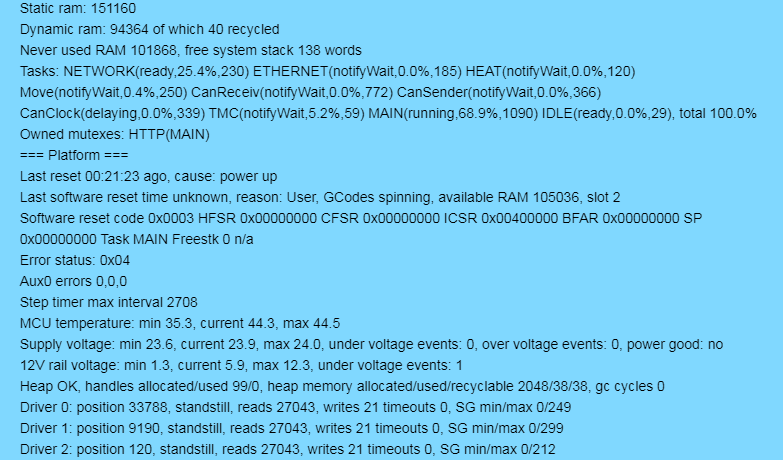
also i am try to simulate same Gcode with RRF 3.5.0 rc4 in that only one gcode give the bad command error (2 time simulated and giving two different error which is attached in image)
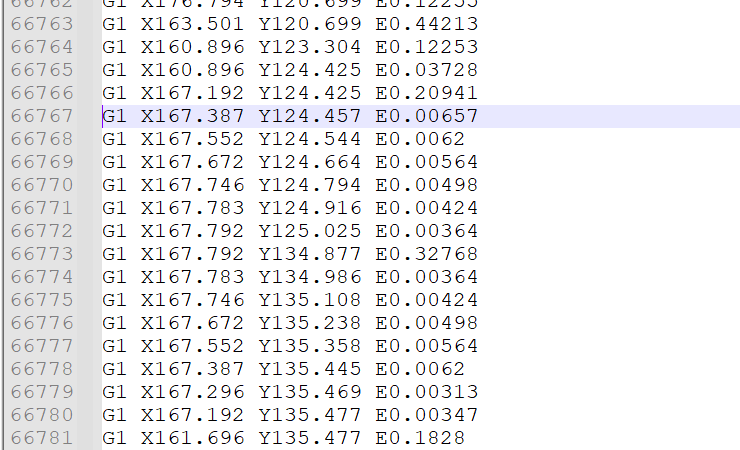
also attached Gcode SS
also i am try to simulate same Gcode with RRF 3.5.0 rc4 in that only one gcode give the bad command error (2 time simulated and giving two different error which is attached in image)
also attached Gcode SS
Hey,
I am using Duet 2 wifi with RRF 3.5.0 rc3.
sudden change in jerk and acceleration after resume APF, it's set random value which is not in config and not in gcode.
gcode in which jerk is 300 mm/sec & acceleration 500 mm/s2, when i run the power failure sequence and after resume the print there is sudden vibration in X Y axis, so i am rum M204 to check it's acceleration and the result of it is 50000 mm/s2 and jerk is 600mm/s but gcode generated on jerk 300mm/s and acceleration 500 mm/s2.
Hey,
I am trying to disable wifi of Duet2 Wifi by following below on YAT terminal.
M552
M552 S-1
M552
M552 S0
But it's not stop and whenever power up it display Error: Wifi module reported: network scan failed.
Any Suggestions.
When I am printing anything I found 12V under-voltage event (9.5V)after 1 layer complete.
Error comes up when 2nd layer start printing.
This error repeat every time while printing.
If I left machine ON with extruder heater and bed heater ON, then I didn't get any error.
I am using Duet Main Board 6HC with 24V Meanwell SMPS and it's output is 24V I have verified.
Changed my extruder heater.
Checked all wiring and no lose connection.
Can you please give me advice how can I find root cause for this under voltage event?
@dc42 @Phaedrux @T3P3Tony Is there any way to troubleshoot this problem?
@dc42 hey,
After upgrading to the latest firmware version 3.5.0rc4, we observed improvement in print acceleration settings. However, the travel acceleration is taking random value: while print acceleration seems to be functioning correctly, travel acceleration values are fluctuating unexpectedly.
@droftarts Thanks Yesterday i am trying using paneldue but missed M588 s"*" so it's not working. Thank you once again.
Yesterday i am trying using paneldue but missed M588 s"*" so it's not working. Thank you once again.
@droftarts
David seems to be absolutely right. Thank you both of you!
When I set skew factor 0, this problem doesn't appear.
now my question is , if skew is enabled , after some printing or moves, Y position changes. On HOMEY, I see Y position as -0.6 or so. How do I set it to 0 on Yhome?
Ideally, on Homing, position should be 0, right? Please revert on this.
(note: atimes this negative value is -0.0, -0.6, -1.9 etc, on homing Y)
Thanks & Regards,
R006
Thank you.
Could you please provide example files for both driver-warning.g and driver-stall.g, if available?
Thank you for your response.
I have one question and observation:
I created two macro files:
When testing:
driver-warning.g is triggered correctly when the error is "Phase may be disconnected."
However, when testing for a stall condition (e.g., by physically obstructing the axis), driver-stall.g is also triggered even if a phase is disconnected.
So, in both cases — stall detection and disconnected phase — the driver-stall.g macro is executed.
Question:
Is there a way to differentiate between a true stall detection and a driver error like "phase may be disconnected", so that only one specific macro is called for each event(is there any object model)?
I would like to handle these two cases differently in macros or messages. Is there any solution for this?
Hello,
I’m using a Duet 2 WiFi board running RepRapFirmware version 3.6.0rc3, and I’m encountering the following error when printing from SD Card 1 (PanelDue SD card):
Error: Cannot read file, error code 1
This issue does not occur during simulation — it only appears when attempting to physically print the file. I also tested this with RRF version 3.6.0 (stable) and encountered the same issue.
Could you please help me identify the root cause and suggest a possible solution? @dc42 @Phaedrux
@dc42
I am currently using RepRapFirmware version 3.6.0rc1 and testing it on a table-top setup.
Could you please provide an example of a driver-warning file for reference?
I am using a Duet 3 board with three Z-axis stepper motors connected. If any motor connector becomes disconnected, a warning message appears:
"Driver 0.4 Phase A or B may be disconnected."
**I would like to implement code that automatically performs the following actions when this warning is triggered:
I have tried using stall detection and created a driver-warning.g file with the following command:
M915 Z0.2:0.4:0.5 S2 R3
However, this approach did not work as expected. I am testing this on a table-top setup.
@dc42
Okay, when was it released?
Hey,
After recently updating RepRapFirmware (RRF) to version 3.6.0rc2 and the PanelDue firmware to version 3.5.1, I noticed that the progress bar does not display when printing or simulating G-code. Everything else appears to function normally, but the progress indicator is missing.
Could you please advise if this is a known issue or if there’s a configuration step I may have missed?
@dc42 @Phaedrux
@dc42 said in warning: received malformed responses:
@R006 which version of PanelDueFirmware are you using? RRF 3.6 requires version 3.5.1. The "malformed responses" messages may occur because you are using an older version.
Panel version is 3.4.1, but this warning appears after resume APF only, in normal printing this warning is not appears.
@dc42 said in warning: received malformed responses:
@R006 :
- Where are the "malformed responses" warnings coming from? DWC, or something else?
On panel

- Are you running the Duet in standalone or SBC mode?
standalone mode
- Please upgrade to firmware 3.6.0-rc.3.
Okay, but could you please clarify why this warning appears?
Is it possibly related to cabling, signal integrity, or something else?
I’ve read "https://forum.duet3d.com/topic/32837/malformed-responses-warnings-on-paneldue-7i?_=1746789074093", and it seems to describe the same issue I’m experiencing — so I suspect it might be related.
Any insights would be appreciated.
Hi,
I’m using a Duet 3 MB6HC running RepRapFirmware 3.6.0-rc2, and I’m encountering a "malformed responses" warning after repeatedly using the Resume After Power Failure (APF) function.
Under normal conditions, the warning does not appear. However, after resuming from APF multiple times, the warning is consistently displayed — though it does not appear to affect any functionality.
Could you please advise on what might be causing this issue?
Any suggestions would be greatly appreciated.
@dc42 @Phaedrux
Thanks,