@crpalmer said in Revo Voron PZ Probe firmware configuration?:
@SpeedyDad Two of the machines are running the latest stable (3.5.4?) and the idex printer is running 3.6.0-rc2+2 (for a bug fix needed to calibrate the tool offsets).
it sounds like you're not getting anywhere. I would suggest that you do the following:
- post your full config.g
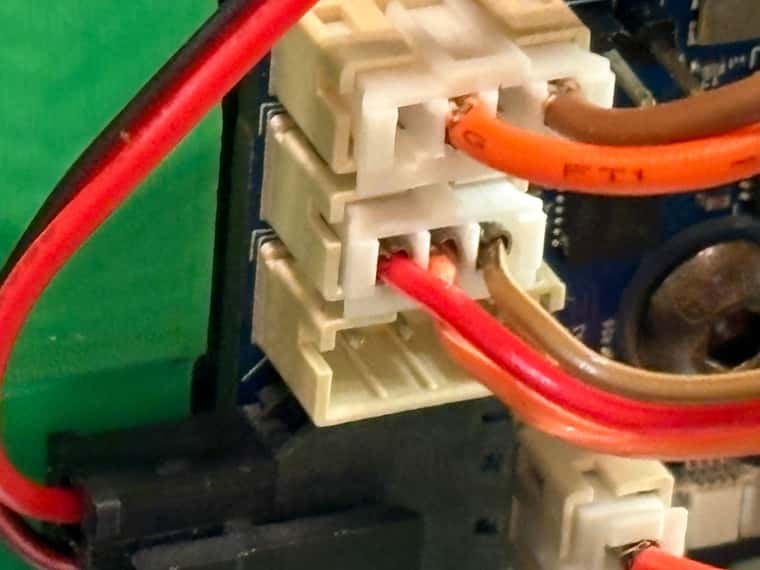
- try to get a good picture of the wire connections at the pz probe pcb and the toolboard pcb to show how it is wired (and post it here)
- verify that when you tap the nozzle, the triggered light on the pz probe flashes
- verify that when everything is idle that the probe status shows 0
- verify that when you tap the nozzle, the probe status flashes to 1000
If one of those things don't work, that's the first problem you need to fix.
if all that works, then I would manually (or via a G92 Z0 G1 Zxx) make sure that you have a large space between your nozzle and your print bed and then run G30 S-1. Let the probe run a for a couple of seconds to make sure it isn't false triggering and then tap the nozzle. If it doesn't stop, hit emergency stop.
If you want to try those steps and report back along with your full config.g, I (or someone else) may have a suggestion.
OK, Here are the results of above:
My connections to the Roto toolboard are as follows. Red from the PZ Board = io1 +3.3v. Orange from PZ Board = io1.in. Brown from PZ Board = GND. I have verified continuity at both ends of the signal wire.

I get a power LED on the PZ Board.
I get a flash of the amber LED when I tout the nozzle end.
Probe shows as 0 on the panel when idle.
Probe does not flash to 1000 during trigger
Running a G30 S-1 and tapping the probe does nothing.
My config.g
; Configuration file for Duet 3 Mini 5+ (firmware version 3.3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.4.1 on Sat Aug 17 2024 21:55:35 GMT-0700 (Mountain Standard Time)
; General preferences
M575 P1 S1 B57600 ; enable support for PanelDue
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"Voron" ; set printer name
M669 K1 ; select CoreXY mode
; Wait a moment for the CAN expansion boards to start
G4 S2
; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet
; Accelerometers
M955 P121.0 I20 ; configure accelerometer on board #20
; Drives
M569 P0.0 S0 D2 ; driver 0.0 goes backwards (X axis)
M569 P0.1 S0 D2 ; driver 0.1 goes backwards (Y axis)
M569 P0.2 S0 D2 ; driver 0.2 goes backwards (Z axis)
M569 P0.3 S1 D2 ; driver 0.3 goes forwards (Z axis)
M569 P0.4 S0 D2 ; driver 0.4 goes backwards (Z axis)
M569 P0.5 S1 D2 ; driver 0.5 goes forwards (Z axis)
M569 P121.0 S0 D2 ; driver 20.0 goes backwards (extruder 0)
; Axes
M584 X0.0 Y0.1 Z0.2:0.3:0.4:0.5 ; set axis mapping
M671 X-70:-70:470:470 Y20:455:455:20 S10 ; position of leadscrew/bed pivot point at front left, rear left, rear right and front right
M350 X16 Y16 Z16 I1 ; configure microstepping with interpolation
M906 X1700 Y1700 Z1700 ; set axis driver currents
M92 X80 Y80 Z400 ; configure steps per mm
M208 X-15:400 Y0:390 Z0:400 ; set minimum and maximum axis limits
M566 X100 Y100 Z60
M203 X20000 Y20000 Z3600 ; set maximum speeds (mm/min)
M201 X8000 Y8000 Z30
; Extruders
M584 E121.0 ; set extruder mapping
M350 E16 I1 ; configure microstepping with interpolation
M906 E1000 ; set extruder driver currents
M92 E397 ; configure steps per mm
M566 E150 ; set maximum instantaneous speed changes (mm/min)
M203 E3600 ; set maximum speeds (mm/min)
M201 E1500 ; set accelerations (mm/s^2)
; Motor Idle Current Reduction
M906 I30 ; set motor current idle factor
M84 S30 ; set motor current idle timeout
; Endstops
M574 X2 S1 P"121.io2.in" ; configure switch-type (e.g. microswitch) endstop for high end on X via pin io0.in
M574 Y2 S1 P"io2.in" ; configure switch-type (e.g. microswitch) endstop for high end on Y via pin io2.in
M574 Z1 S2
; Z-Probe
;M950 S0 C"121.io0.out" ; create servo pin 0 for BLTouch
;M558 K0 P8 C"^!io1.in" R1.0 H5 F400 A5 T24000
;G31 P500 X0 Y0 Z0 ; set Z probe trigger value, More Z = Closer
M558 P8 C"!^io1.in" A5 R1 H5 F400 T24000
G31 X0 Y0 Z0 P100
M575 P1 B9600 S7
; Mesh Bed Compensation
M557 X20:400 Y30:380 S40 ; define mesh grid
; Heaters
;Bed
M308 S0 P"temp0" Y"thermistor" T100000 B4550 C0 A"Bed" ; configure sensor 0 as thermistor on pin temp0
M950 H0 C"out0" T0 ; create bed heater output on out0 and map it to sensor 0
M307 H0 R0.203 K0.232:0.000 D2.45 E1.35 S1.00 B0
M140 H0 ; map heated bed to heater 0
M143 H0 S120
;Hotend
M308 S1 P"121.temp0" Y"thermistor" A"Hotend" T100000 B4725 C7.060000e-8 ; configure sensor 1 as thermistor on pin 20.temp0
M950 H1 C"121.out0" T1 ; create nozzle heater output on 20.out0 and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit
M143 H1 S280 ; set temperature limit for heater 1 to 280C
; Fans
M950 F0 C"121.out1" ; create fan #0
M106 P0 C"Part Fan" S0 L0 X1 B0.1 ; configure fan #0
M950 F1 C"121.out2" ; create fan #1
M106 P1 C"Hotend Fan" S0 B0.1 H1 T45 ; configure fan #1
; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C
T0
; Custom settings are not defined
; Miscellaneous
M501 ; load saved parameters from non-volatile memory
M911 S10 R11 P"M913 X0 Y0 G91 M83 G1 Z3 E-5 F1000" ; set voltage thresholds and actions to run on power loss