hbot homes correctly but prints mirrored ,
-
So what is next to do bed.g / G32 ?
-
next is to get it to recognize it has a bltouch attached, as M280 P7 S10 :deploy bltouch does not work
-
@tracar said in hbot homes correctly but prints mirrored ,:
M280 P7 S10
If we're using RRF3 now, that should be P0 instead of P7.
There should be an M950 command in your config.g that create the servo 0 pin for the bltouch. That's where the zero comes from.
-
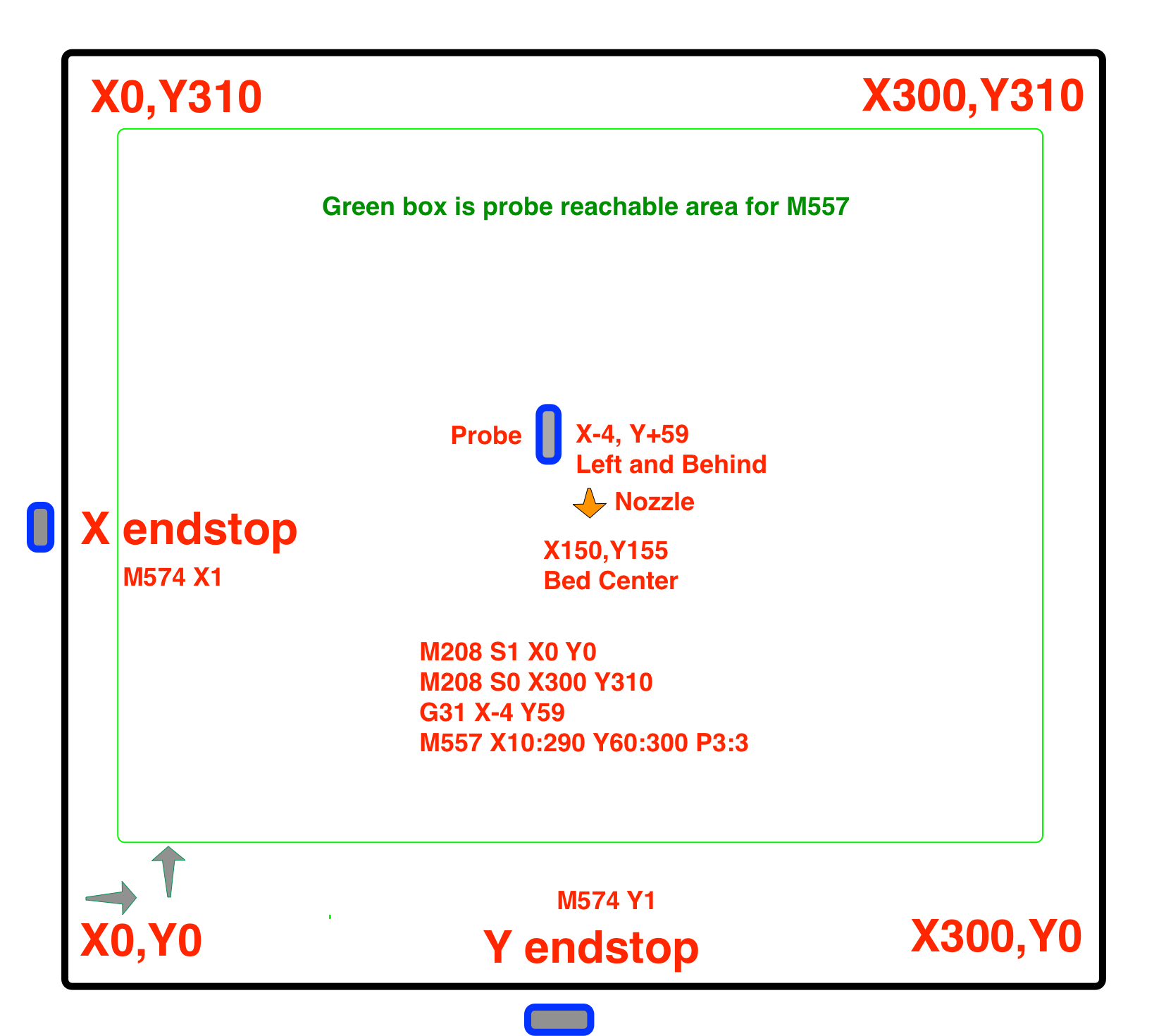
Doing up a diagram like this can be very helpful in getting the offsets all straight. Piece of grid paper works well if you're not a paint wiz.
There's also some useful info here:
https://duet3d.dozuki.com/Wiki/Test_and_calibrate_the_Z_probe
https://duet3d.dozuki.com/Wiki/Using_mesh_bed_compensation
https://duet3d.dozuki.com/Wiki/Bed_levelling_using_multiple_independent_Z_motorsThis page will also be useful for getting the hang of RRF3:
https://duet3d.dozuki.com/Wiki/RepRapFirmware_3_overviewAnd of course the Gcode wiki that will tell you how each gcode works:
https://duet3d.dozuki.com/Wiki/Gcode#main -
Which heater pin are you using ?.
Mine is heater 7 , so this should help you .
; Z-Probe config.g M558 P9 C"^zprobe.in" H2 F100 T8000 A5 ; set Z probe type to bltouch and the dive height + speeds M950 S0 C"exp.heater7" ; create servo pin 0 for BLTouch G31 P500 X-45 Y-6 Z2.98 ; set Z probe trigger value, offset and trigger height M557 X55:295 Y55:295 S80 ; define mesh grid .. 30 , 60 , 80Lines 5 and 6 set to your own offsets and mesh grid
This works with any heater; deployprobe.g ; called to deploy a physical Z probe ; M280 P0 S10 ; deploy BLTouch; retractprobe.g ; called to retract a physical Z probe ; M280 P0 S90 ; retract BLTouch -
yes H7_pwm on the end of the expansion board
can not get a response from the bltouch
; Self-Test
;
M280 P0 S120 ; Send PWM channel 7 the S10 (angle) command, inverted signal -
@tracar said in hbot homes correctly but prints mirrored ,:
can not get a response from the bltouch
And that's using this in your config,g?
M558 P9 C"^zprobe.in" H2 F100 T8000 A5 ; set Z probe type to bltouch and the dive height + speeds
M950 S0 C"exp.heater7" ; create servo pin 0 for BLTouchIf that's what you have in config, and it's wired to the right pin, check the wiring continuity.
-
this is the current config
; Z-Probe
M950 S0 C"exp.heater7" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F120 T24000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X0 Y0 Z0.445 ; set Z probe trigger value, offset and trigger height
M557 X50:400 Y50:500 S50 ; define mesh gridand
; deployprobe.g
; called to deploy a physical Z probe
M280 P7 S10 ; deploy BLTouch
does not workcontinuity of wiring is fine
-
BIG HINT ,This works with any heater
; deployprobe.g ; called to deploy a physical Z probe ; M280 P0 S10 ; deploy BLTouch; retractprobe.g ; called to retract a physical Z probe ; M280 P0 S90 ; retract BLTouch -
i have already changed the p0 and still non responsive
-
@tracar , what pin are you using .
-
@tracar said in hbot homes correctly but prints mirrored ,:
H7_pwm on the expansion board
and zprobe in -
@tracar Pin 31 ?
-
@peter247 yes
-
This post is deleted! -
This post is deleted! -
I can't see anything wrong with the set ups .
if you had a Maestro that needs to be set up differently , but you are running a duet 2 wifi , so that doesn't wash .
Can only think it's wiring ?
-
it works if i downgrade firmware
-
what is your full zprobe config
have you removed the M307 H7 A-1 C-1 D-1 ; disable heater on PWM channel for BLTouch
-
M307 H7 A-1 C-1 D-1 ; disable heater on PWM channel for BLTouch
M950 S0 C"exp.heater7" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F120 T6000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X0 Y40.9 Z.445 ; set Z probe trigger value, offset and trigger height
M557 X50:400 Y50:400 S100 ; define mesh grid x50:400 starts at 50, ends at 400 SXX moves by what its set to between points