@CaLviNx seriously stop commenting. I do beta testing and bug fixing for a living. I took the steps I did for a reason. Everyone else has been trying to help while all you've been doing is throwing jabs in and out of this thread. I don't need you to tell me what the "smart approach" is because "the whole point of the exercise" is to figure out what happened and to see if I could fix it, not applying a band-aid.
Best posts made by dhusolo
-
RE: Duet 3 SBC DCS has stoppedposted in Beta Firmware
-
RE: Upgrade gone badposted in Firmware installation
@oliof in the end it was solved by reflashing the firmware with bossa. He was using a 10 foot cable. Told him to use a shorter USB cable and it worked.
-
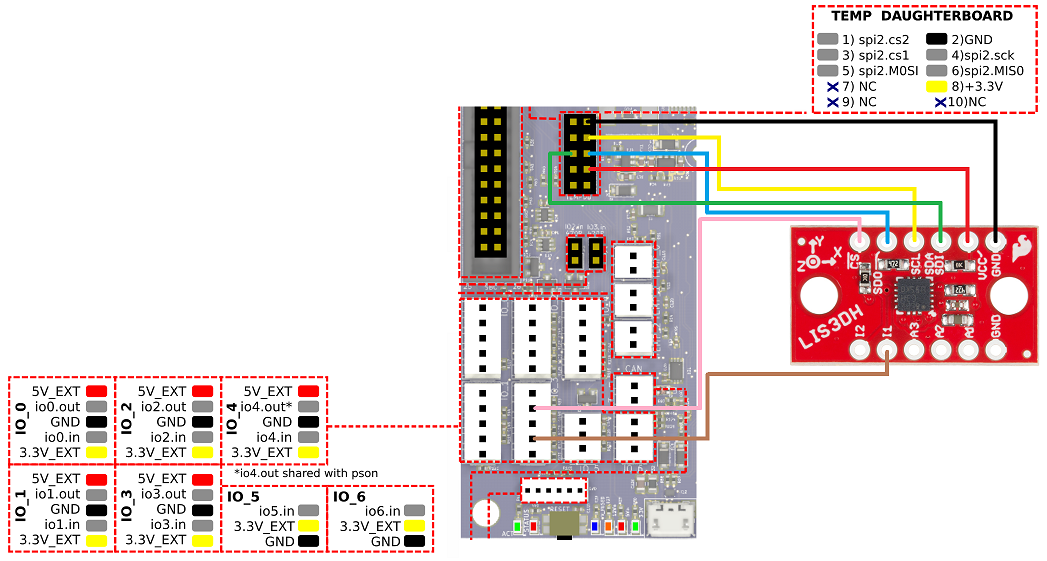
RE: LIS3DH accelerometer to duet 3 mini 5+ wifiposted in Duet Hardware and wiring
@ratrig0331 It tells you what pin on the accelerometer plugs into what pin on the Duet 3 Mini.
-
RE: Do we have to declare jerk somewhere in FW?posted in General Discussion
@deonholt actually that's my mistake.
M566: Set allowable instantaneous speed changeM205 is an alternative to M566 for compatibility with Marlin.
Open your config.g file through your web browser. and make the changes there. Don't use M500.I used Marlin for years before switching to Duet. It's a bit of a learning curve but once you get used to it it's easier and more convenient doing it through your browser.
As far as order goes look in the Gcode page i linked previously. If there's conditions as to where the code must be it'll say in the description. Personally I have my configs setup with each gcode relating to each other entered together
; General preferences M80 ; Turns on the ATX power supply G90 ; send absolute coordinates... M83 ; ...but relative extruder moves M667 S0 ; Select Cartesian mode ; Network M552 S1 ; enable network M552 P192.168.###.### ; set IP Address M553 P255.255.###.### ; set Mac Address M554 P192.168.###.### ; Set default Gateway M586 P0 S1 ; enable HTTP M586 P1 S0 ; disable FTP M586 P2 S0 ; disable Telnet ; Drives M569 P0 S1 ; physical drive 0 goes forwards M569 P1 S0 ; physical drive 1 goes backwards M569 P2 S1 ; physical drive 2 goes forwards M569 P3 S0 ; physical drive 3 goes backwards M569 P4 S1 ; physical drive 3 goes forwards M584 X0 Y1 Z2:4 E3 ; set drive mapping M350 X32 Y32 I0 ; configure microstepping without interpolation M350 Z16 E16 I1 ; configure microstepping with interpolation M92 X160.00 Y160.00 Z400.00 E415.15 ; set steps per mm M566 X700.00 Y700.00 Z240.00 E5000.00 ; set maximum instantaneous speed changes (mm/min) M203 X18000.00 Y18000.00 Z1000.00 E12000.00 ; set maximum speeds (mm/min) M201 X1500.00 Y1500.00 Z120.00 E5000.00 ; set accelerations (mm/s^2) M906 X1600 Y1600 Z1500 E1600 I30 ; set motor currents (mA) and motor idle factor in per cent M84 S120 ; Set idle timeout ; Axis Limits M208 X0 Y-18 Z0 S1 ; set axis minima M208 X300 Y280 Z216 S0 ; set axis maxima ; Endstops M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystop M574 Z1 S2 ; configure Z-probe endstop for low end on Z M591 D0 P1 C"e0stop" S1 ; configure filament runout sensor for high end on extruder drive 0 via pin i03.in ; Z-Probe M950 S0 C"exp.heater3" ; create servo pin 0 for BLTouch M558 P9 C"^zprobe.in" H5 F300 T9000 ; set Z probe type to bltouch and the dive height + speeds G31 P500 X0 Y0 Z.200 ; set Z probe trigger value, offset and trigger height M557 X23:250 Y20:275 S75 ; define mesh grid ; Heaters M308 S0 P"bedtemp" Y"thermistor" A"Bed" T100000 B4725 C0.0000000706 R4700 ; configure sensor 0 as thermistor on pin bedtemp M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0 M307 H0 A284.0 C843.8 D11.0 V23.9 B0 ; Heatbed PID M140 H0 ; map heated bed to heater 0 M143 H0 S120 ; set temperature limit for heater 0 to 120C M308 S1 P"e0temp" Y"thermistor" A"Hotend" T100000 B4725 C0.0000000706 R4700 ; configure sensor 1 as thermistor on pin e0temp M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1 M307 H1 A284.1 C115.5 D2.6 V23.9 S0.9 B0 ; Hotend PID .4mm M143 H1 S260 M308 S2 P"mcu-temp" Y"mcu-temp" A"Duet Board" ; Configure MCU sensor ; Fans M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency M106 P0 C"MB Fan" T40:60 H2 ; set fan 0 value. Thermostatic control is turned on M950 F1 C"fan1" Q500 ; create fan 1 on pin fan1 and set its frequency M106 P1 C"Layer fan" S0 H-1 ; set fan 1 value. Thermostatic control is turned off M950 F2 C"fan2" Q500 ; create fan 2 on pin fan2 and set its frequency M106 P2 C"HE Fan" S1 H1 T40 ; set fan 2 value. Thermostatic control is turned off ; Tools M563 P0 D0 H1 F1 ; define tool 0 G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C ; Custom settings M564 H0 ; Let the Jog buttons work blv: added to allow jog buttons M501 ; Load EEPROM ; Miscellaneous M575 P1 S1 B57600 ; enable support for PanelDue -
RE: Euclid probe and Z=0 datumposted in Tuning and tweaking
@fcwilt Agreed. I planned to incorporate it in my build and was disappointed when I couldn't use it. However after enough tweaking I think I'm in a better place. Upgrading to the PTFE coated leadscrews helped quite a bit. I also figured out the leadscrew offsets were slightly off. Once I changed the config results started to improve. Even more so after using 4 points to calculate the leadscrew offset. This was my last G32 without the spring steel sheet on.
-
RE: BLV MGN Cube Neopixel Questionposted in Duet Hardware and wiring
You should post this on the Facebook page as their's more users familiar with the BLV Cube and the creator of the sketch is on there as well.
-
RE: Duet 3 SBC : Need explanation on multi Z homingposted in General Discussion
After homing manually jog the nozzle to your first probe point. It should be the farthest point along X min the probe can reach and note the coordinates. That's where P0 would be. Jog to the fathest side on X max the probe can reach and that would be P1. With 2 steppers Y doesn't matter but X does.
M671 is the actual positions of the leadscrews. the 1st point will be negative because it's outside of the print area. But make sure the first coordinate in M671 is the stepper motor that is wired to the board in Z0.1
This is my bed.g file that gets called when running G32
I have 3 independent lead screws whish is why I have P0-P2.
M557 defines the probing boundary and P4 probes 4 points on X and Y so 16 total.
It homes, probes each point and adjusts for compensation. It repeats that 3 times than does the actual bed leveling probing.M561 ; clear any bed transform G90 ; absolute positioning G1 Z10 H0 ; Making sure we're not going to hit the side of glass G91 G28 ; home all axis bb M400 ; Wait for move to finish M401 P1 ; Deploy probe M557 X65:328 Y21:291 P4 G30 P0 X55 Y161 Z-99999 ; Probe near left lead screw position -65,166 G30 P1 X328 Y301 Z-99999 ; Probe near right rear lead screw position 364,25 G30 P2 X328 Y17 Z-99999 S3 ; Probe near right front lead screw position 364,25 G28 M401 P1 ; Deploy probe G30 P0 X55 Y161 Z-99999 ; Probe near left lead screw position -65,166 G30 P1 X328 Y301 Z-99999 ; Probe near right rear lead screw position 364,25 G30 P2 X328 Y17 Z-99999 S3 ; Probe near right front lead screw position 364,25 G28 M401 P1 ; Deploy probe G30 P0 X55 Y161 Z-99999 ; Probe near left lead screw position -65,166 G30 P1 X328 Y301 Z-99999 ; Probe near right rear lead screw position 364,25 G30 P2 X328 Y17 Z-99999 S3 ; Probe near right front lead screw position 364,25 G28 M401 P1 ; Deploy probe G29 ; Probe the bed and save height map to file M402 P1 ; Retract probe -
RE: Configuring RT1000posted in Tuning and tweaking
@jay_s_uk Go figure I completely forgot to change that. That worked thanks.
-
RE: 4 Wires BLTouch Connectionposted in Duet Hardware and wiring
I connected the 2 ground wires together and it's been fine
-
RE: Simpilfy 3D Send file to printerposted in General Discussion
I know there are other slicers that have different features that may or may not be better than S3D. I've tried other slicers and I don't like them. I've used S3D for years and there's no reason for me to switch.
-
RE: Duet 3 SBC DCS has stoppedposted in Beta Firmware
So it happened again. I swapped to a Raspberry Pi 4 with new firmware.
11/6/2020, 12:04:08 AM Cancelled printing file 0:/gcodes/a1.gcode, print time was 0h 20m 11/6/2020, 12:04:08 AM Warning: Controller has been reset 11/5/2020, 11:48:41 PM Height map saved to file heightmap.csv 11/5/2020, 11:48:41 PM 16 points probed, min error -0.018, max error 0.070, mean 0.034, deviation 0.027 11/5/2020, 11:48:41 PM Leadscrew adjustments made: -0.027 -0.025 -0.033, points used 3, (mean, deviation) before (-0.028, 0.003) after (-0.000, 0.000) 11/5/2020, 11:48:41 PM Leadscrew adjustments made: -0.059 -0.023 -0.016, points used 3, (mean, deviation) before (-0.031, 0.014) after (0.000, 0.000) 11/5/2020, 11:48:41 PM Leadscrew adjustments made: -0.022 -0.039 -0.054, points used 3, (mean, deviation) before (-0.039, 0.010) after (0.000, 0.000) 11/5/2020, 11:46:07 PM Height map loaded from file heightmap.csv 11/5/2020, 11:44:01 PM M32 "0:/gcodes/a1.gcode" File 0:/gcodes/a1.gcode selected for printing11/6/2020, 12:12:01 AM M122 === Diagnostics === RepRapFirmware for Duet 3 MB6HC version 3.1.1 running on Duet 3 MB6HC v1.01 or later (SBC mode) Board ID: 08DJM-956L2-G43S8-6J9D0-3S46T-9U2LF Used output buffers: 1 of 40 (13 max) === RTOS === Static ram: 154604 Dynamic ram: 163392 of which 64 recycled Exception stack ram used: 544 Never used ram: 74612 Tasks: ETHERNET(blocked,824) NETWORK(ready,1960) HEAT(blocked,1188) CanReceiv(suspended,3820) CanSender(suspended,1420) CanClock(blocked,1436) TMC(blocked,60) MAIN(running,2672) IDLE(ready,76) Owned mutexes: === Platform === Last reset 03:23:27 ago, cause: power up Last software reset at 2020-11-05 20:48, reason: User, spinning module LinuxInterface, available RAM 74612 bytes (slot 3) Software reset code 0x0010 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0444a000 BFAR 0x00000000 SP 0xffffffff Task MAIN Error status: 0 MCU temperature: min 39.7, current 39.9, max 41.4 Supply voltage: min 24.3, current 24.6, max 24.7, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.1, current 12.1, max 12.2, under voltage events: 0 Driver 0: standstill, reads 17162, writes 4 timeouts 0, SG min/max 0/160 Driver 1: standstill, reads 17162, writes 4 timeouts 0, SG min/max 0/400 Driver 2: standstill, reads 17162, writes 4 timeouts 0, SG min/max 0/384 Driver 3: standstill, reads 17162, writes 4 timeouts 0, SG min/max 0/1023 Driver 4: standstill, reads 17162, writes 4 timeouts 0, SG min/max 0/1023 Driver 5: standstill, reads 17162, writes 4 timeouts 0, SG min/max 0/1019 Date/time: 2020-11-06 00:12:00 Slowest loop: 9.38ms; fastest: 0.21ms === Storage === Free file entries: 10 SD card 0 not detected, interface speed: 37.5MBytes/sec SD card longest read time 0.0ms, write time 0.0ms, max retries 0 === Move === Hiccups: 0(0), FreeDm: 375, MinFreeDm: 322, MaxWait: 302820ms Bed compensation in use: mesh, comp offset 0.000 === MainDDARing === Scheduled moves: 3599, completed moves: 3599, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1 === AuxDDARing === Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1 === Heat === Bed heaters = 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamberHeaters = -1 -1 -1 -1 === GCodes === Segments left: 0 Movement lock held by null HTTP* is ready with "M122" in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon* is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 0.77ms; fastest: 0.03ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions Telnet(0), 0 sessions HTTP sessions: 0 of 8 - Ethernet - State: establishingLink Error counts: 0 0 0 0 0 Socket states: 0 0 0 0 0 0 0 0 === Filament sensors === Extruder 0 sensor: ok === CAN === Messages sent 7459, longest wait 0ms for type 0 === Linux interface === State: 0, failed transfers: 8 Last transfer: 19ms ago RX/TX seq numbers: 2795/56430 SPI underruns 13, overruns 11 Number of disconnects: 3 Buffer RX/TX: 0/0-0 === Duet Control Server === Duet Control Server v3.1.1 Code buffer space: 4096 Configured SPI speed: 8000000 Hz Full transfers per second: 32.12 -
RE: Duet Tool Board v1 fan questionposted in Duet Hardware and wiring
@phaedrux Haha genius. I missed that one. Thanks
-
RE: Duet 3 RRF 3.1.1 SBC USB webcamposted in Duet Web Control
@Phaedrux Actually I just tried it out and it worked without a hitch. Took probably 5 minutes
-
RE: Duet 3 SBC DCS has stoppedposted in Beta Firmware
Disconnected panel due
11/6/2020, 5:23:22 PM Connection established 11/6/2020, 5:21:46 PM Connection interrupted, attempting to reconnect... DCS has been stopped 11/6/2020, 5:21:16 PM Cancelled printing file 0:/gcodes/a1.gcode, print time was 0h 19m 11/6/2020, 5:21:15 PM Warning: Controller has been reset 11/6/2020, 5:06:52 PM Height map saved to file heightmap.csv11/6/2020, 5:23:59 PM M122 === Diagnostics === RepRapFirmware for Duet 3 MB6HC version 3.1.1 running on Duet 3 MB6HC v1.01 or later (SBC mode) Board ID: 08DJM-956L2-G43S8-6J9D0-3S46T-9U2LF Used output buffers: 1 of 40 (13 max) === RTOS === Static ram: 154604 Dynamic ram: 163392 of which 140 recycled Exception stack ram used: 544 Never used ram: 74536 Tasks: ETHERNET(blocked,832) NETWORK(ready,1968) HEAT(blocked,1188) CanReceiv(suspended,3820) CanSender(suspended,1384) CanClock(blocked,1436) TMC(blocked,68) MAIN(running,2672) IDLE(ready,76) Owned mutexes: === Platform === Last reset 03:50:47 ago, cause: power up Last software reset at 2020-11-05 20:48, reason: User, spinning module LinuxInterface, available RAM 74612 bytes (slot 3) Software reset code 0x0010 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0444a000 BFAR 0x00000000 SP 0xffffffff Task MAIN Error status: 0 MCU temperature: min 39.5, current 39.8, max 40.3 Supply voltage: min 24.3, current 24.6, max 24.8, under voltage events: 0, over voltage events: 0, power good: yes 12V rail voltage: min 12.0, current 12.1, max 12.1, under voltage events: 0 Driver 0: standstill, reads 32788, writes 7 timeouts 0, SG min/max 0/1023 Driver 1: standstill, reads 32787, writes 8 timeouts 0, SG min/max 0/226 Driver 2: standstill, reads 32788, writes 7 timeouts 0, SG min/max 0/1023 Driver 3: standstill, reads 32788, writes 7 timeouts 0, SG min/max 0/179 Driver 4: standstill, reads 32788, writes 7 timeouts 0, SG min/max 0/175 Driver 5: standstill, reads 32788, writes 7 timeouts 0, SG min/max 0/127 Date/time: 2020-11-06 17:23:58 Slowest loop: 9.29ms; fastest: 0.21ms === Storage === Free file entries: 10 SD card 0 not detected, interface speed: 37.5MBytes/sec SD card longest read time 0.0ms, write time 0.0ms, max retries 0 === Move === Hiccups: 0(0), FreeDm: 375, MinFreeDm: 323, MaxWait: 541330ms Bed compensation in use: mesh, comp offset 0.000 === MainDDARing === Scheduled moves: 3364, completed moves: 3364, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1 === AuxDDARing === Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1 === Heat === Bed heaters = 0 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamberHeaters = -1 -1 -1 -1 === GCodes === Segments left: 0 Movement lock held by null HTTP* is ready with "M122" in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon* is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 0.76ms; fastest: 0.03ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions Telnet(0), 0 sessions HTTP sessions: 0 of 8 - Ethernet - State: establishingLink Error counts: 0 0 0 0 0 Socket states: 0 0 0 0 0 0 0 0 === Filament sensors === Extruder 0 sensor: ok === CAN === Messages sent 5531, longest wait 0ms for type 0 === Linux interface === State: 0, failed transfers: 22 Last transfer: 20ms ago RX/TX seq numbers: 1766/48405 SPI underruns 38, overruns 14 Number of disconnects: 2 Buffer RX/TX: 0/0-0 === Duet Control Server === Duet Control Server v3.1.1 Code buffer space: 4096 Configured SPI speed: 8000000 Hz Full transfers per second: 32.0311/6/2020, 5:24:21 PM M98 P"config.g" HTTP is enabled on port 80 FTP is disabled TELNET is disabled Warning: M307: Heater 0 appears to be over-powered. If left on at full power, its temperature is predicted to reach 351C -
RE: Tool board Accelerometerposted in Duet Hardware and wiring
@jay_s_uk Perfect thanks. I'll give it a shot when I get home from work
-
RE: Duet 3 RRF 3.1.1 SBC USB webcamposted in Duet Web Control
@Phaedrux Thanks!
Do you know if this instructable would work?
How-to-Make-Raspberry-Pi-Webcam-Server-and-Stream -
RE: My BLV MGN cube build/upgrade saga (ongoing)posted in My Duet controlled machine
@whopping-pochard No links. I just swapped to a Duet 3 but I haven't published my parts. As far as the bed leveling has been once I got the offsets right it's been awesome. My biggest thing was bed stability so I redid my bed carriage. Now mine has 3x 331mm on Y (with one in the middle for extra stability and reduce possibility of twisting) and 2x 400mm on the X. With those dimensions the bed mounts are directly in the center of the 2020 channel so less printed parts needed to mount it.
It's not the current setup but it's my most current picture I have

-
RE: Duet 3 SBC DCS has stoppedposted in Beta Firmware
I haven't loaded my config file but I flashed Duet3Firmware_MB6HC.bin through Bossa. It looks like it's communicating with the RPI again.
M122
m122 === Diagnostics === RepRapFirmware for Duet 3 MB6HC version 3.1.1 running on Duet 3 MB6HC v1.01 or later (SBC mode) Board ID: 08DJM-956L2-G43S8-6J9D0-3S46T-9U2LF Used output buffers: 1 of 40 (10 max) === RTOS === Static ram: 154604 Dynamic ram: 161360 of which 20 recycled Exception stack ram used: 236 Never used ram: 76996 Tasks: NETWORK(ready,1980) HEAT(blocked,1452) CanReceiv(suspended,3820) CanSender(suspended,1488) CanClock(blocked,1436) TMC(suspended,252) MAIN(running,5184) IDLE(ready,76) Owned mutexes: === Platform === Last reset 00:09:59 ago, cause: power up Last software reset at 2020-11-05 20:48, reason: User, spinning module LinuxInterface, available RAM 74612 bytes (slot 3) Software reset code 0x0010 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0444a000 BFAR 0x00000000 SP 0xffffffff Task MAIN Error status: 0 MCU temperature: min 15.0, current 25.8, max 25.9 Supply voltage: min 0.2, current 0.3, max 0.3, under voltage events: 0, over voltage events: 0, power good: no 12V rail voltage: min 0.1, current 0.1, max 0.2, under voltage events: 0 Driver 0: ok, reads 0, writes 0 timeouts 0, SG min/max 0/0 Driver 1: ok, reads 0, writes 0 timeouts 0, SG min/max 0/0 Driver 2: ok, reads 0, writes 0 timeouts 0, SG min/max 0/0 Driver 3: ok, reads 0, writes 0 timeouts 0, SG min/max 0/0 Driver 4: ok, reads 0, writes 0 timeouts 0, SG min/max 0/0 Driver 5: ok, reads 0, writes 0 timeouts 0, SG min/max 0/0 Date/time: 2020-11-08 14:26:06 Slowest loop: 2.36ms; fastest: 0.13ms === Storage === Free file entries: 10 SD card 0 not detected, interface speed: 37.5MBytes/sec SD card longest read time 0.0ms, write time 0.0ms, max retries 0 === Move === Hiccups: 0(0), FreeDm: 375, MinFreeDm: 375, MaxWait: 0ms Bed compensation in use: none, comp offset 0.000 === MainDDARing === Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1 === AuxDDARing === Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1 === Heat === Bed heaters = -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamberHeaters = -1 -1 -1 -1 === GCodes === Segments left: 0 Movement lock held by null HTTP* is ready with "M122" in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger* is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon* is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 1.03ms; fastest: 0.01ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions Telnet(0), 0 sessions HTTP sessions: 0 of 8 - Ethernet - State: disabled Error counts: 0 0 0 0 0 Socket states: 0 0 0 0 0 0 0 0 === CAN === Messages sent 0, longest wait 0ms for type 0 === Linux interface === State: 0, failed transfers: 0 Last transfer: 12ms ago RX/TX seq numbers: 19460/19461 SPI underruns 0, overruns 0 Number of disconnects: 0 Buffer RX/TX: 0/0-0 === Duet Control Server === Duet Control Server v3.1.1 Code buffer space: 4096 Configured SPI speed: 8000000 Hz Full transfers per second: 5.64M122 DSF
m122 DSF === Diagnostics === RepRapFirmware for Duet 3 MB6HC version 3.1.1 running on Duet 3 MB6HC v1.01 or later (SBC mode) Board ID: 08DJM-956L2-G43S8-6J9D0-3S46T-9U2LF Used output buffers: 1 of 40 (12 max) === RTOS === Static ram: 154604 Dynamic ram: 161360 of which 20 recycled Exception stack ram used: 236 Never used ram: 76996 Tasks: NETWORK(ready,1980) HEAT(blocked,1452) CanReceiv(suspended,3820) CanSender(suspended,1488) CanClock(blocked,1436) TMC(suspended,252) MAIN(running,4512) IDLE(ready,76) Owned mutexes: === Platform === Last reset 00:12:41 ago, cause: power up Last software reset at 2020-11-05 20:48, reason: User, spinning module LinuxInterface, available RAM 74612 bytes (slot 3) Software reset code 0x0010 HFSR 0x00000000 CFSR 0x00000000 ICSR 0x0444a000 BFAR 0x00000000 SP 0xffffffff Task MAIN Error status: 0 MCU temperature: min 25.6, current 25.8, max 26.0 Supply voltage: min 0.3, current 0.3, max 0.3, under voltage events: 0, over voltage events: 0, power good: no 12V rail voltage: min 0.1, current 0.2, max 0.2, under voltage events: 0 Driver 0: ok, reads 0, writes 0 timeouts 0, SG min/max not available Driver 1: ok, reads 0, writes 0 timeouts 0, SG min/max not available Driver 2: ok, reads 0, writes 0 timeouts 0, SG min/max not available Driver 3: ok, reads 0, writes 0 timeouts 0, SG min/max not available Driver 4: ok, reads 0, writes 0 timeouts 0, SG min/max not available Driver 5: ok, reads 0, writes 0 timeouts 0, SG min/max not available Date/time: 2020-11-08 14:28:49 Slowest loop: 1.97ms; fastest: 0.13ms === Storage === Free file entries: 10 SD card 0 not detected, interface speed: 37.5MBytes/sec SD card longest read time 0.0ms, write time 0.0ms, max retries 0 === Move === Hiccups: 0(0), FreeDm: 375, MinFreeDm: 375, MaxWait: 0ms Bed compensation in use: none, comp offset 0.000 === MainDDARing === Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1 === AuxDDARing === Scheduled moves: 0, completed moves: 0, StepErrors: 0, LaErrors: 0, Underruns: 0, 0 CDDA state: -1 === Heat === Bed heaters = -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1 -1, chamberHeaters = -1 -1 -1 -1 === GCodes === Segments left: 0 Movement lock held by null HTTP* is ready with "M122 D0 S0 F0" in state(s) 0 Telnet is idle in state(s) 0 File is idle in state(s) 0 USB is idle in state(s) 0 Aux is idle in state(s) 0 Trigger* is idle in state(s) 0 Queue is idle in state(s) 0 LCD is idle in state(s) 0 SBC is idle in state(s) 0 Daemon* is idle in state(s) 0 Aux2 is idle in state(s) 0 Autopause is idle in state(s) 0 Code queue is empty. === Network === Slowest loop: 1.03ms; fastest: 0.01ms Responder states: HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) HTTP(0) FTP(0) Telnet(0), 0 sessions Telnet(0), 0 sessions HTTP sessions: 0 of 8 - Ethernet - State: disabled Error counts: 0 0 0 0 0 Socket states: 0 0 0 0 0 0 0 0 === CAN === Messages sent 0, longest wait 0ms for type 0 === Linux interface === State: 0, failed transfers: 0 Last transfer: 12ms ago RX/TX seq numbers: 24793/24794 SPI underruns 0, overruns 0 Number of disconnects: 0 Buffer RX/TX: 0/0-0 === Duet Control Server === Duet Control Server v3.1.1 Code buffer space: 4096 Configured SPI speed: 8000000 Hz Full transfers per second: 32.80 -
RE: My BLV MGN cube build/upgrade saga (ongoing)posted in My Duet controlled machine
@flux_capacitor That's because he's using a different source file due to all the changes he's done.
Z Drive System.zip
If you want to stay up to date with the project join the facebook page. Thingiverse went to crap after their last update and they don't seem to keen on fixing it.