@Veti said in Noob building a HEVO in need of help.:
@Quattro said in Noob building a HEVO in need of help.:
I haven't changed much in the config, i don't know how many steps it is. How do i know? How do i set the probe to actice? What is wrong about the M574 line?
it depends on your stepper motor 0.9 degree or 1.8 degree and your lead screw pitch.
normal values are 400 or 1600.
Ok. The motors are 1.8 degrees, but the threads on the screw has some wierd info, it says "TR8x8 (P2)" The other ones for sale is 8x2. I assume 8mm x 2mm pitch. What does "lead" mean?
@zapta said in Noob building a HEVO in need of help.:
@Quattro said in Noob building a HEVO in need of help.:
No, i did not use the online configurator, because i don't know what values to use. But its maybe better to use that
The online configurators has a sequence for web forms where you enter the data and then it generates the config file for you. I would recommend going through it and if you have questions about specific fields ask here. This will give you a good baseline that you can tweak.
Even if you already have a manual config file, you can generate one from the configurator and compare.
As for the G1 codes in my post, they are for testing through the console, not for the config file. Enter them via the console and watch the direction of the motors.
Also, here are a few things I learned over time from my HEVO build
- Direct extruder (BMG, Hemera, etc) give much better results than bowden.
- Stall detection works great instead of X/Y endstops.
- Bltouch or similar good prod works great as Z endstop and for bed leveling/compensation.
- 0.9 deg X/Y steppers and 16T pulleys everywhere provide more accusation positioning.
- Dampers on the X/Y steppers makes the movements significantly quieter.
- Being proficient with Fusion 360 and being able to modify parts is very useful (I used Fusion for this purpose).
- Bearings and rods from reputable vendors such as Misumi are better than cheap chinese stuff (though the Chinese stuff does work and is getting better and better)
- It takes a lot of work and patient to tweak a printer but it's also fun.
YMMV. ")
I am going to use the configurator now, i have to figure things out first. Thanks for the upgrade advice. I am going to upgrade the printer when i can afford it. The first on the list is a direct extruder. I am drawing alot of car parts in Fusion. I just made some tweakes on reinforced brackets and printing them on the Prusa now.
@Veti said in Noob building a HEVO in need of help.:
@DIY-O-Sphere said in Noob building a HEVO in need of help.:
Maybe the best way to calculate the steps is to use the online calculator
thats included in the configurator. just click on the steps per mm field. it opens up a calculator.
@DIY-O-Sphere said in Noob building a HEVO in need of help.:
@Quattro said in Noob building a HEVO in need of help.:
No, i did not use the online configurator, because i don't know what values to use.
I have prepared a json file, witch you can load into the configurator.
You have to adept steps and the dimension for the Z-axis.
Also the typ of extruder (geared or direct). And typ of end stops.
Then you are able to generate all required sys files.
We have to adepted the config.g later on, as some parts of configuration aren't saved propper in the json file, eg. network settings or should be tweaked a little bit....
config.json
Edit: I have change the json, as there was a mistake in probe configuration
Thank you. I have loaded in the file in the configurator but i need help to understand a few things first.
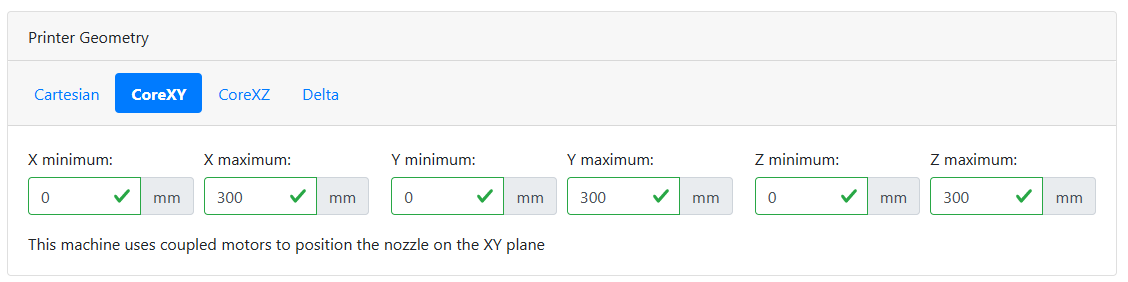
Do i measure "Z maximum" when the bed is on the bottom and up to the nozzle?
Do I have to change the X and Y minimum and maximum if I want to skip the "end stops" and use sensorless? The Y and X axis must be a little bit shorter i think, because both axis is longer then the glass plate on the bed. When I move the Y axis to the back (minimum?) it is aligned to the edge of the glass plate where the extruder stops, but the other way the extrudes goes further then the edge of the plate.
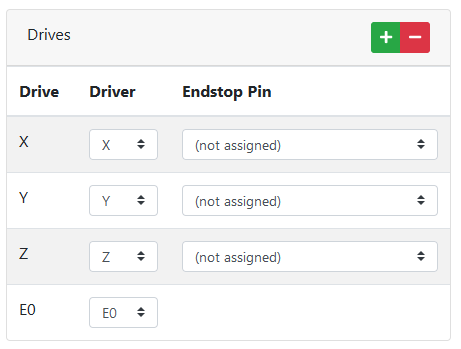
Do I select not assigned here if i want to use sensorless?
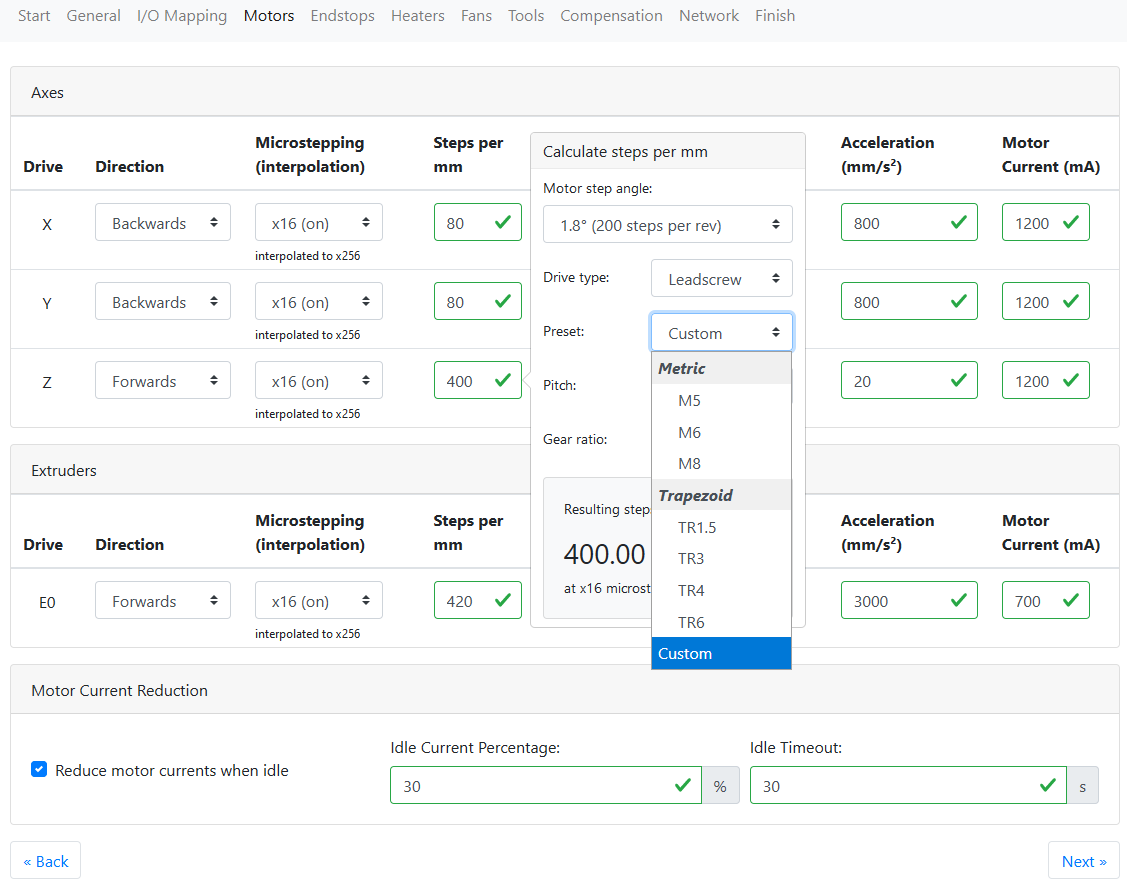
I changed the motor current to 1.2A, The Z-motor is probably 1.67A, does it matter only for the sensorless homing?
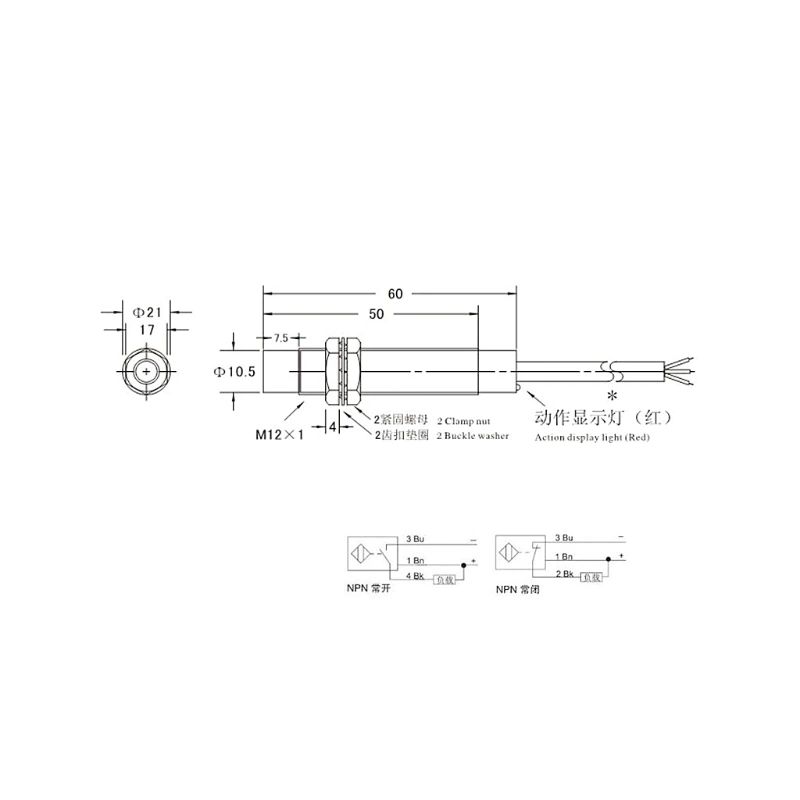
The Z-motor specs is still confusing, there is no TR 8 in the list, should i use M8x2?
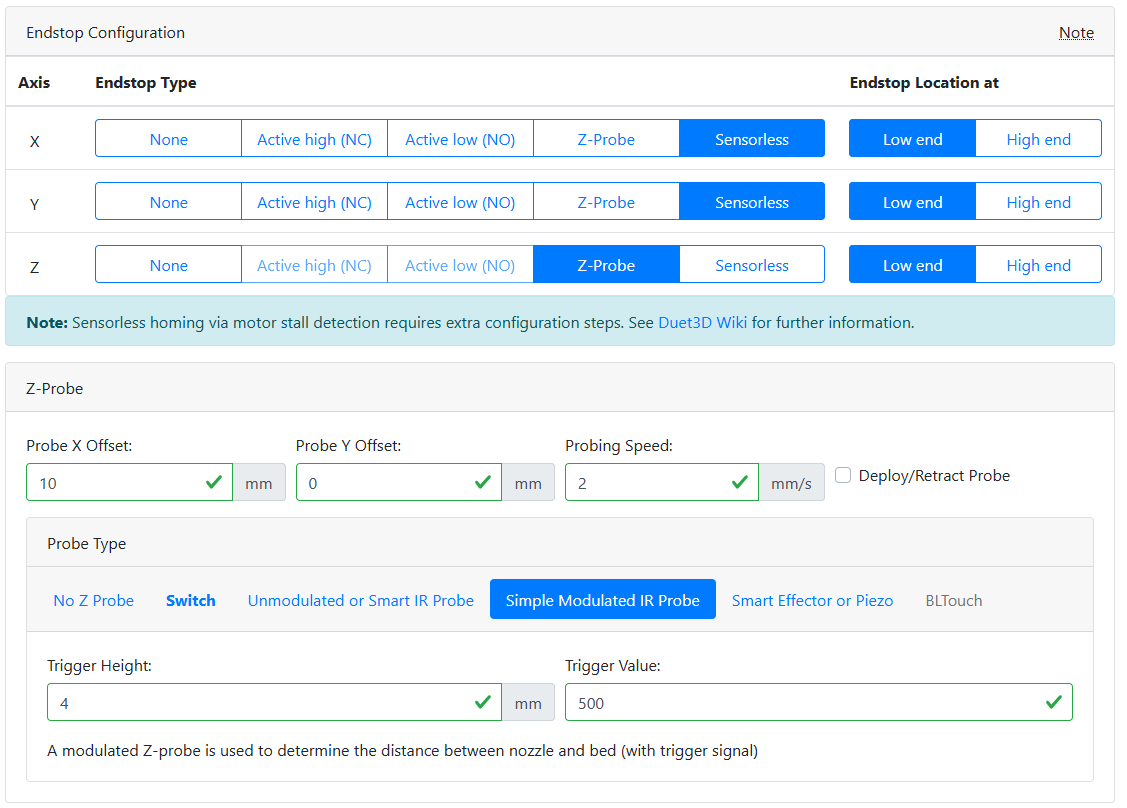
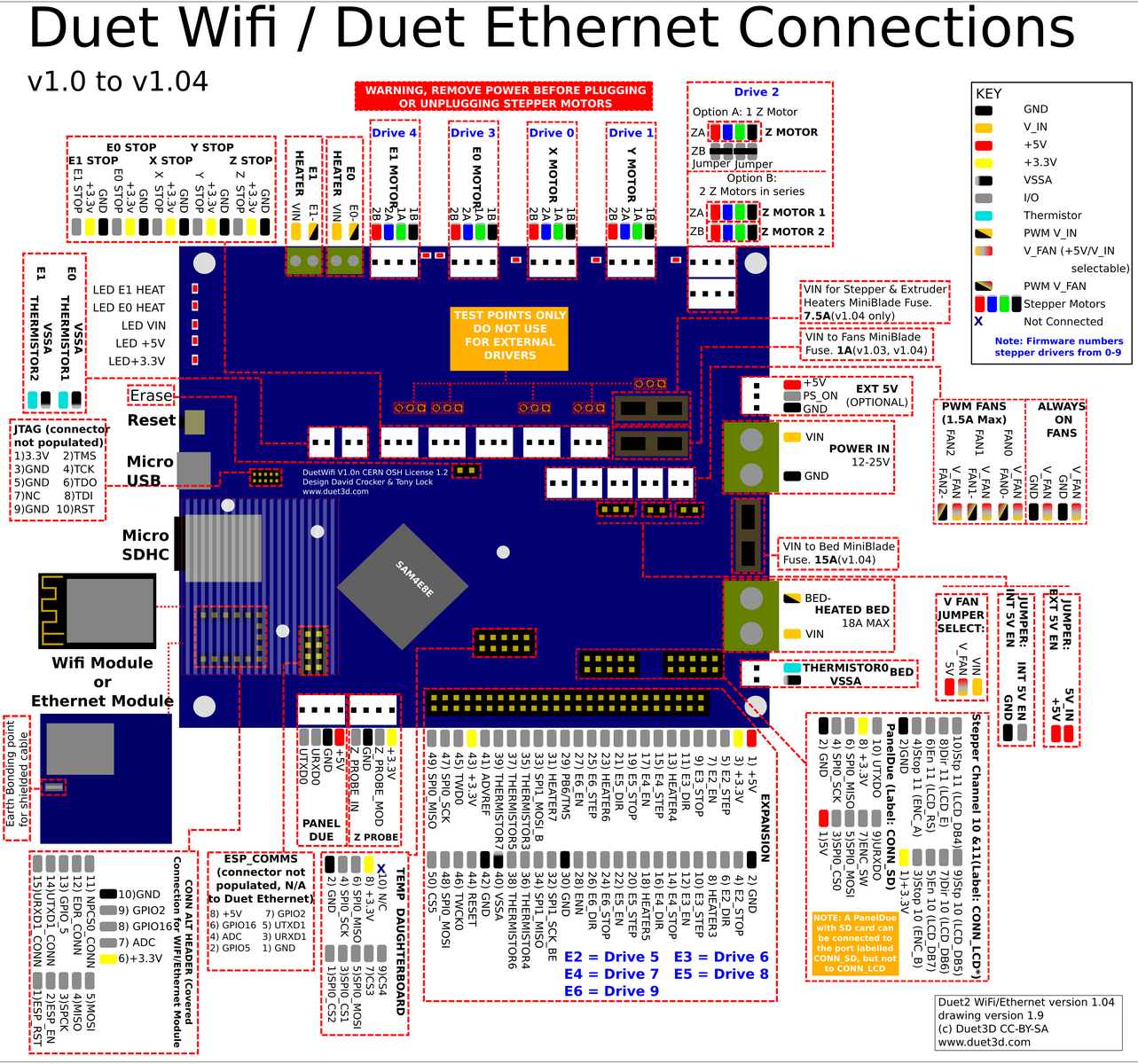
Do i select sensorless on X and Y? What kind of Z-probe is NPN? "Simple modulated IR probe?"
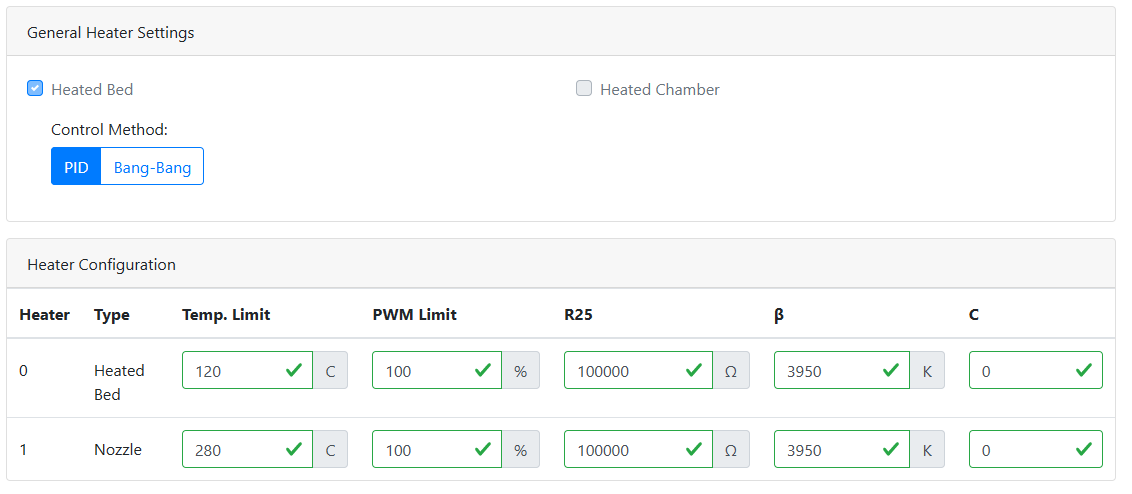
Does it matter if I use the "standard values" for resistance? I have measured them to be around 113k with a multimeter.
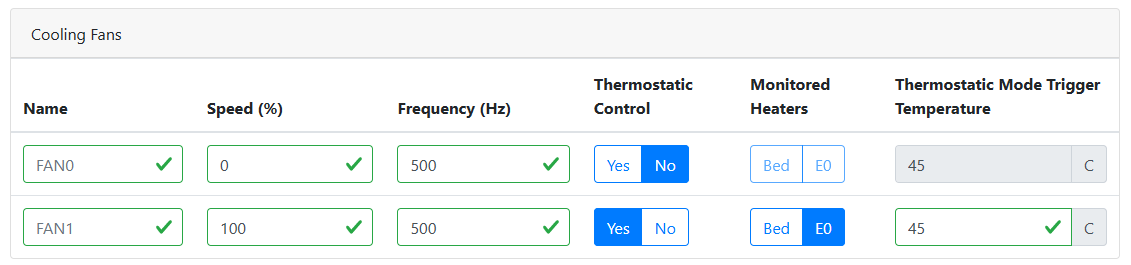
Should i change this if I am going to use a fan for part cooling and one fan for the extruder heat sink?
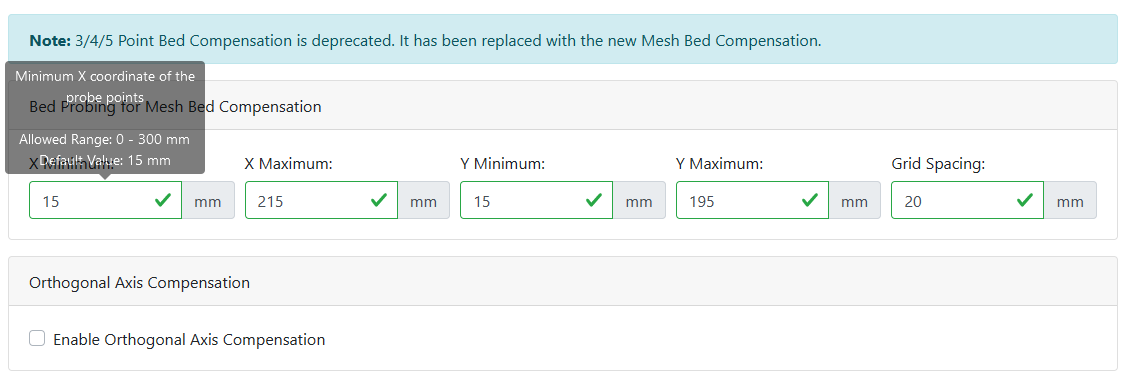
Should the maximum values be changed to 300 - 15mm offset on both X and Y axis? This seems to only measure some of the bed.
Thank you all for helping me!


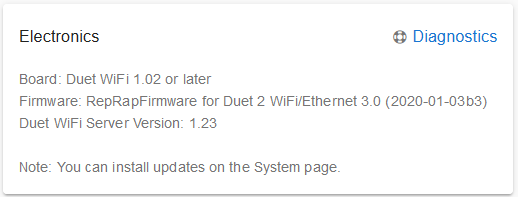
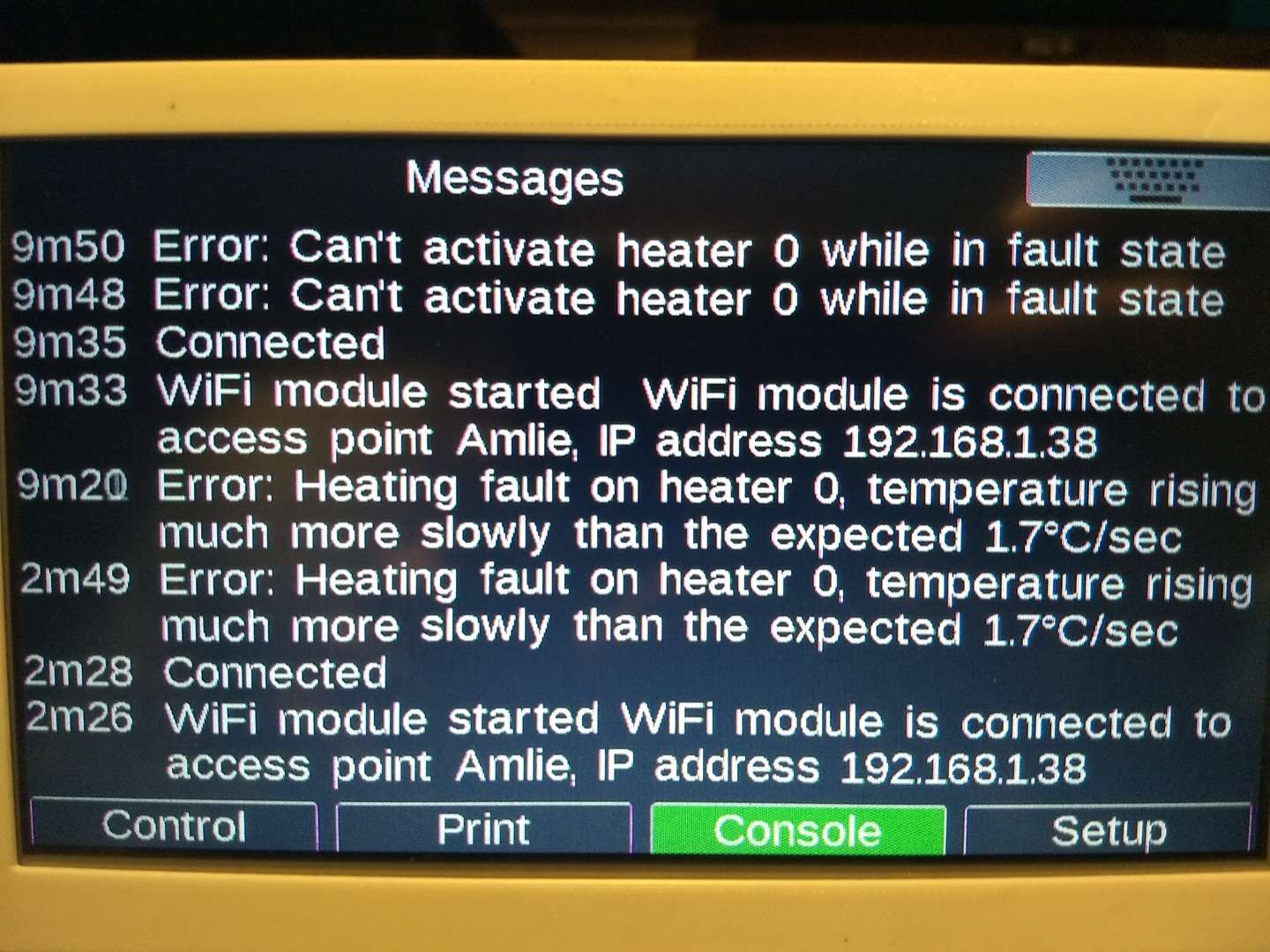
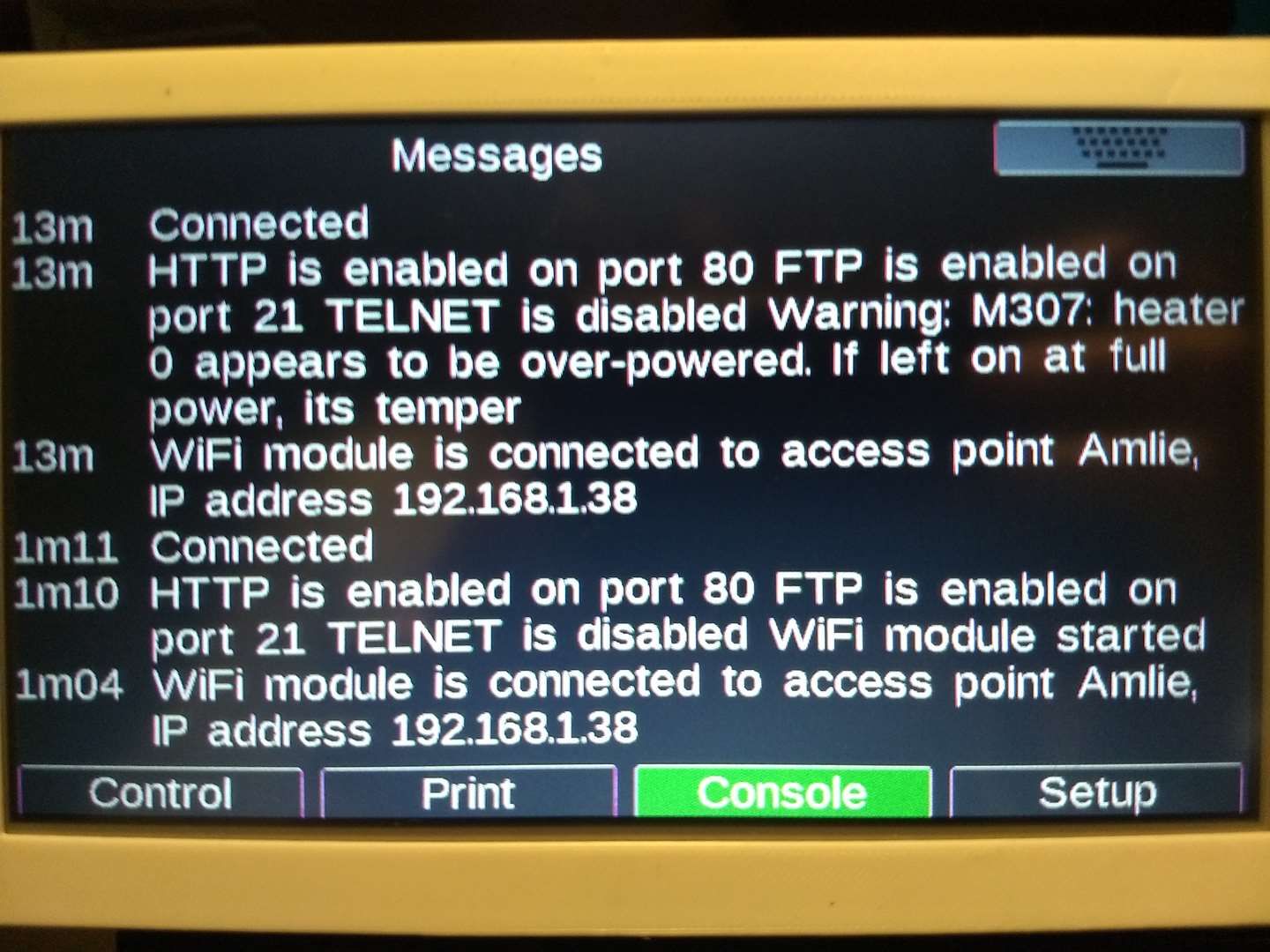
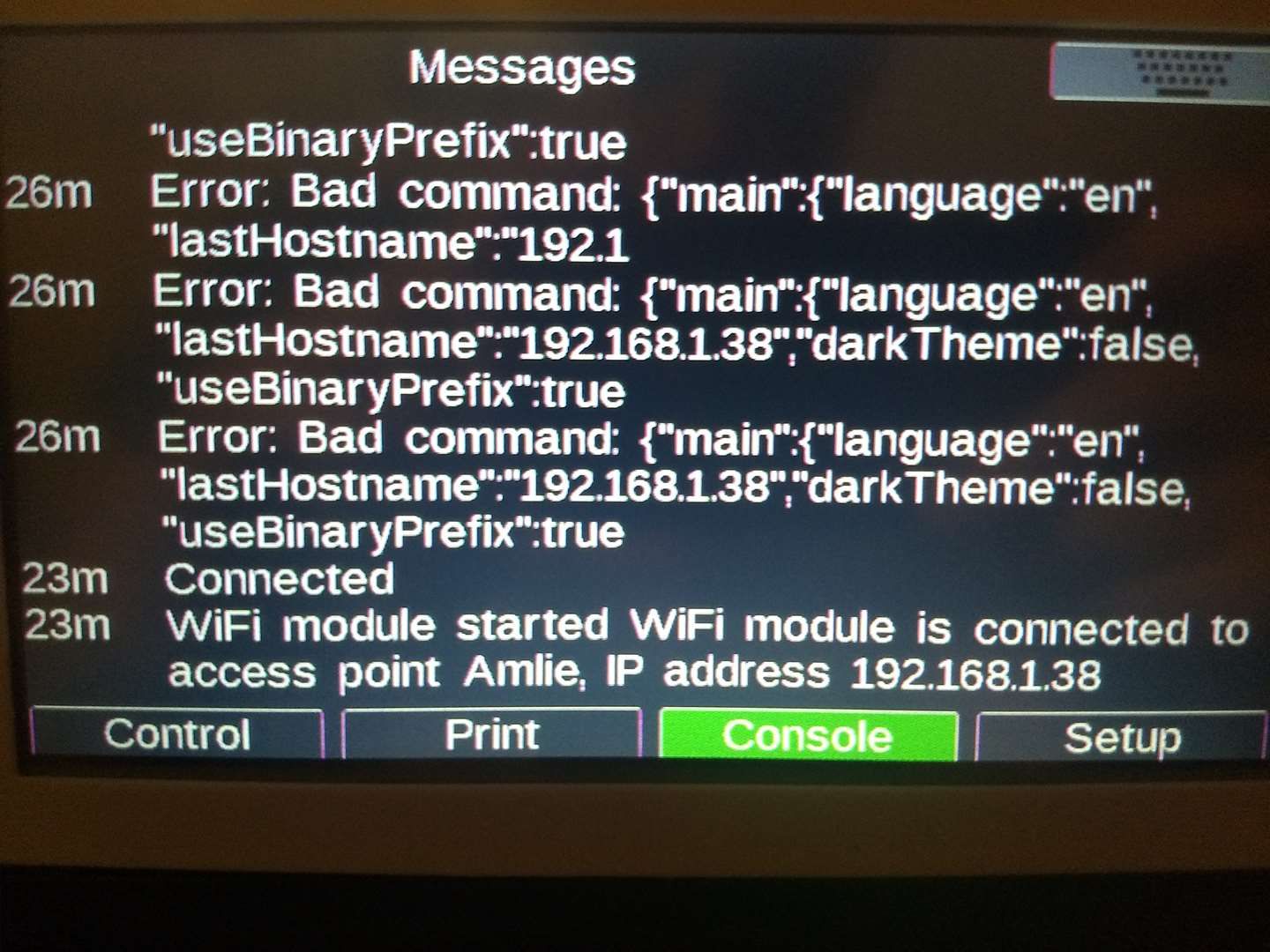 This is the error message that was generated in the load and unload filament macro.
This is the error message that was generated in the load and unload filament macro. The printer is up and running with a Hemera, IR probe, PT100, magnetic filament sensor and a chamber heater. I never got the Piezo to work with my setup. The enclosure is painted white to reflect a light source inside. Plexi glass and 4mm plywood. Magnetic door "lock".
The printer is up and running with a Hemera, IR probe, PT100, magnetic filament sensor and a chamber heater. I never got the Piezo to work with my setup. The enclosure is painted white to reflect a light source inside. Plexi glass and 4mm plywood. Magnetic door "lock". The chamber heater connected with a SSR relay controlled by the Duet.
The chamber heater connected with a SSR relay controlled by the Duet.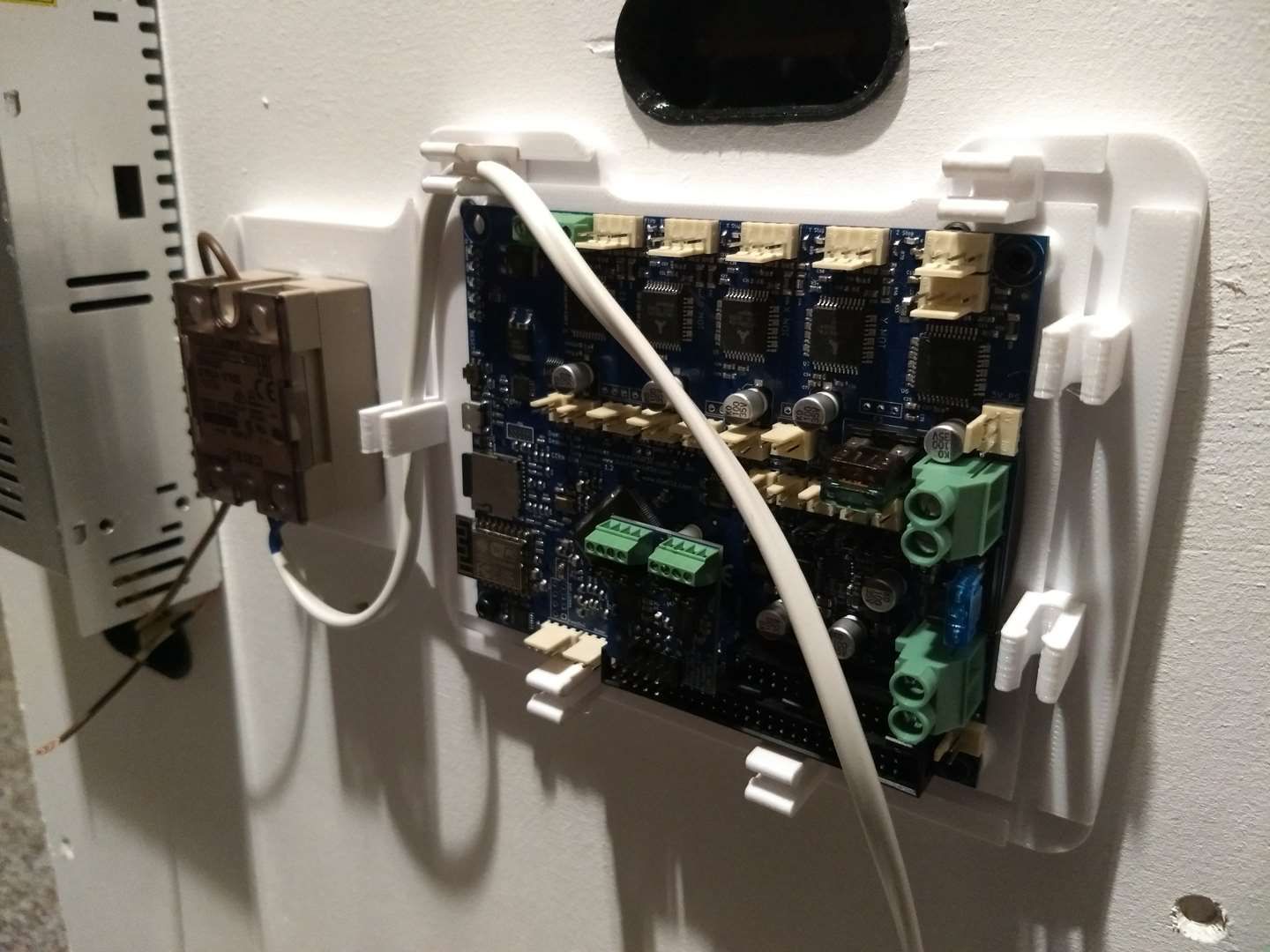 During the building process.
During the building process.
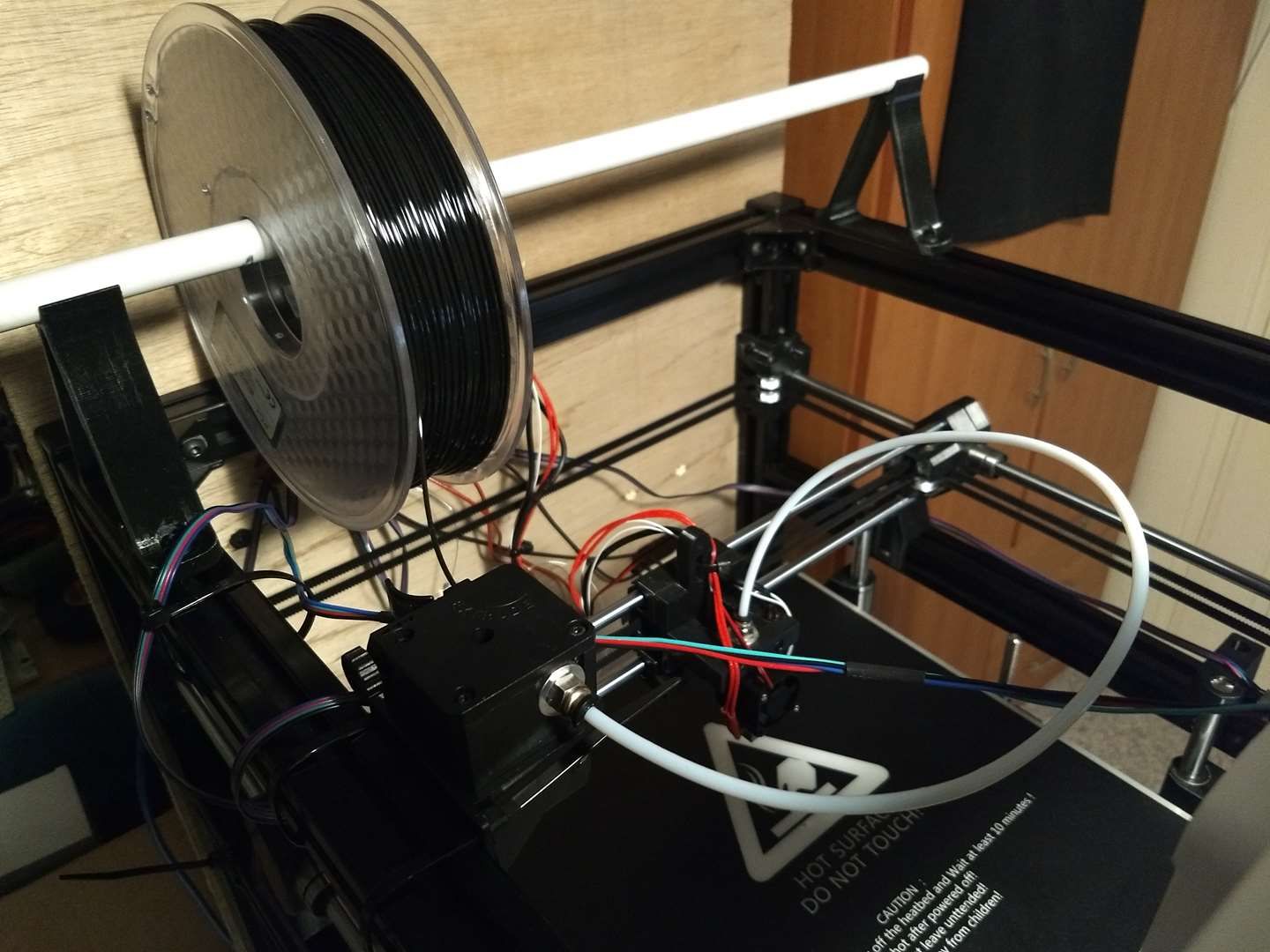
 I made a cable support and the filament holder with bowden holder.
I made a cable support and the filament holder with bowden holder.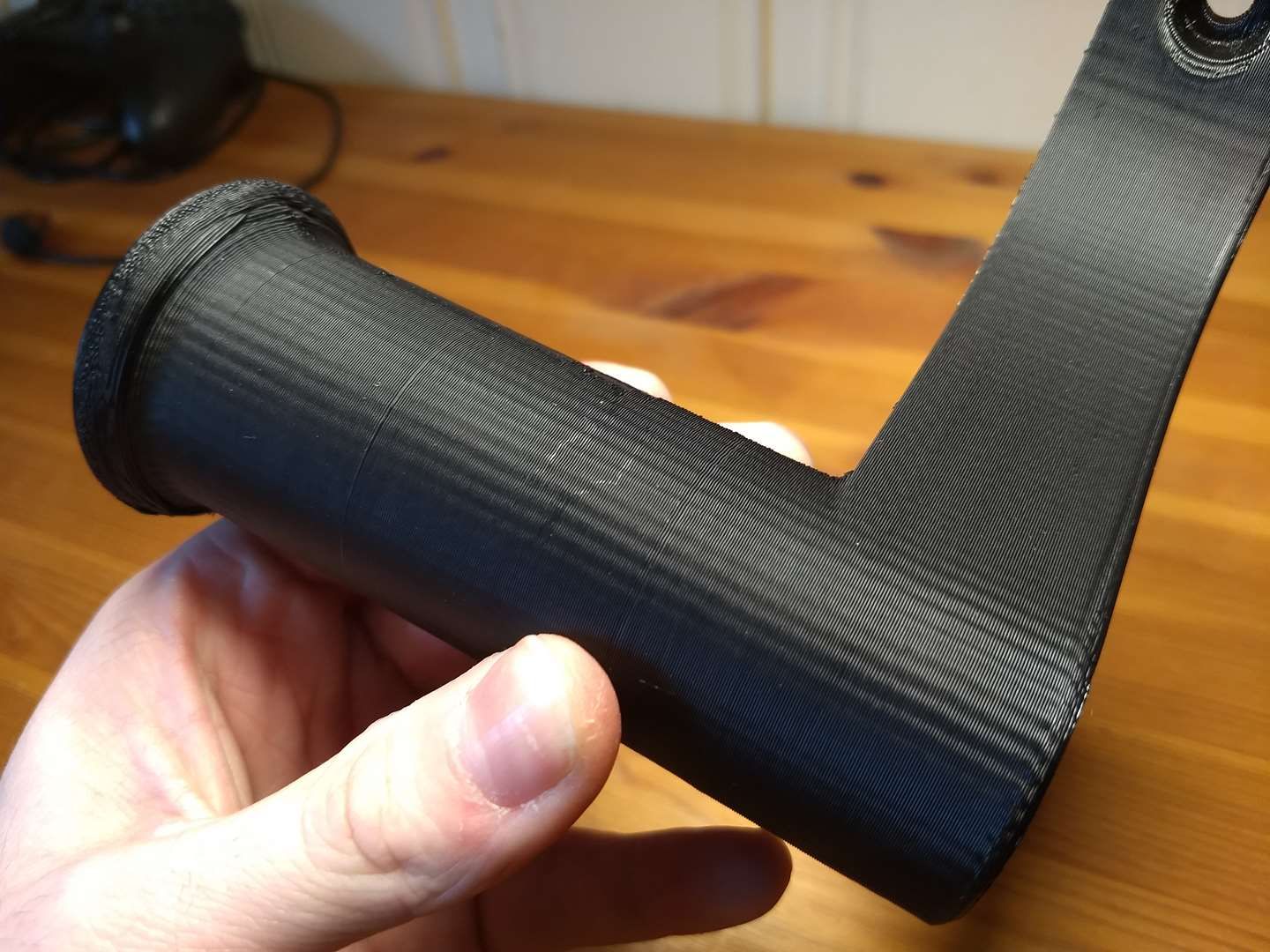 This is where i noticed the wobbling.
This is where i noticed the wobbling.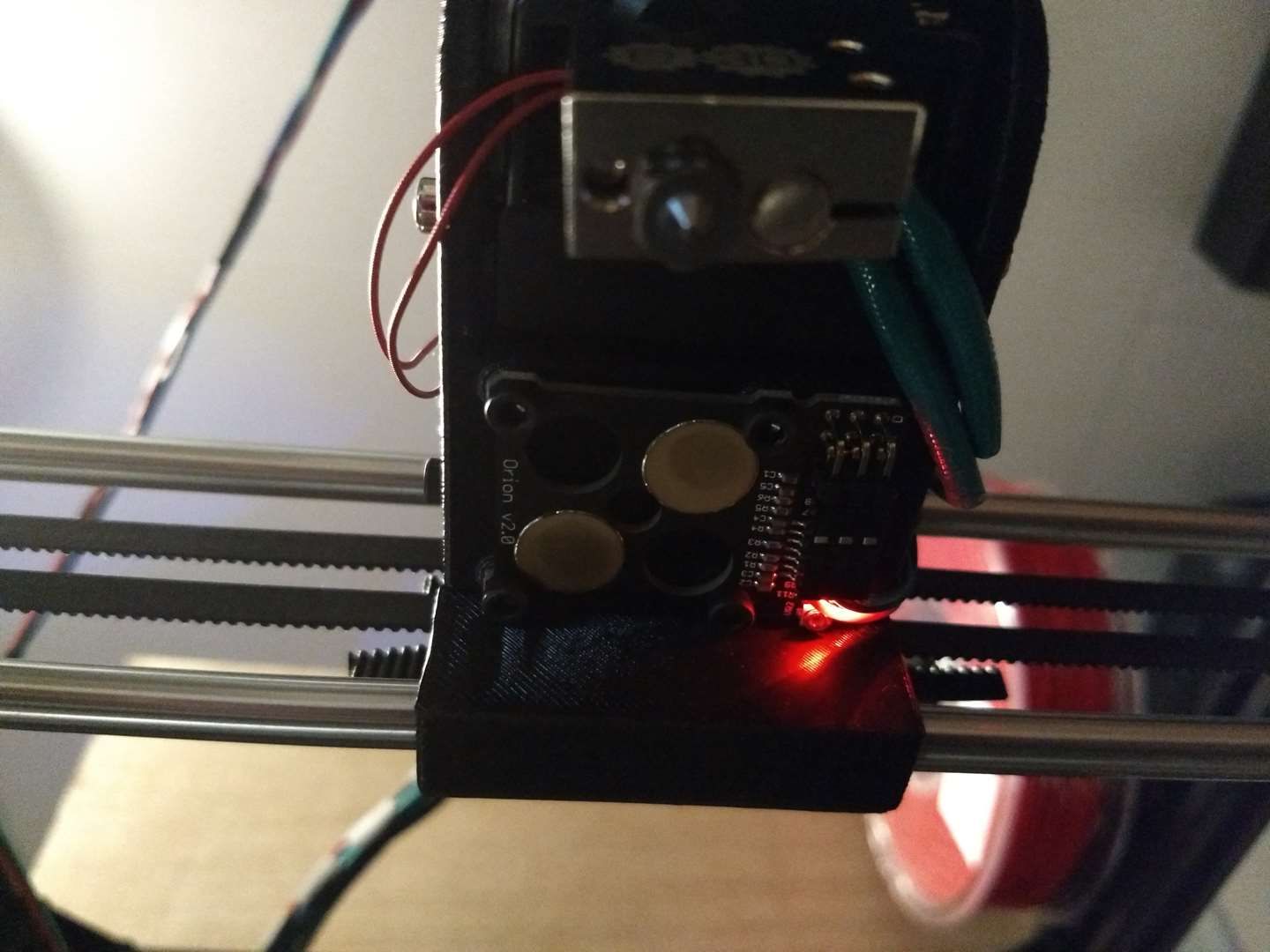
 This is PC.
This is PC.
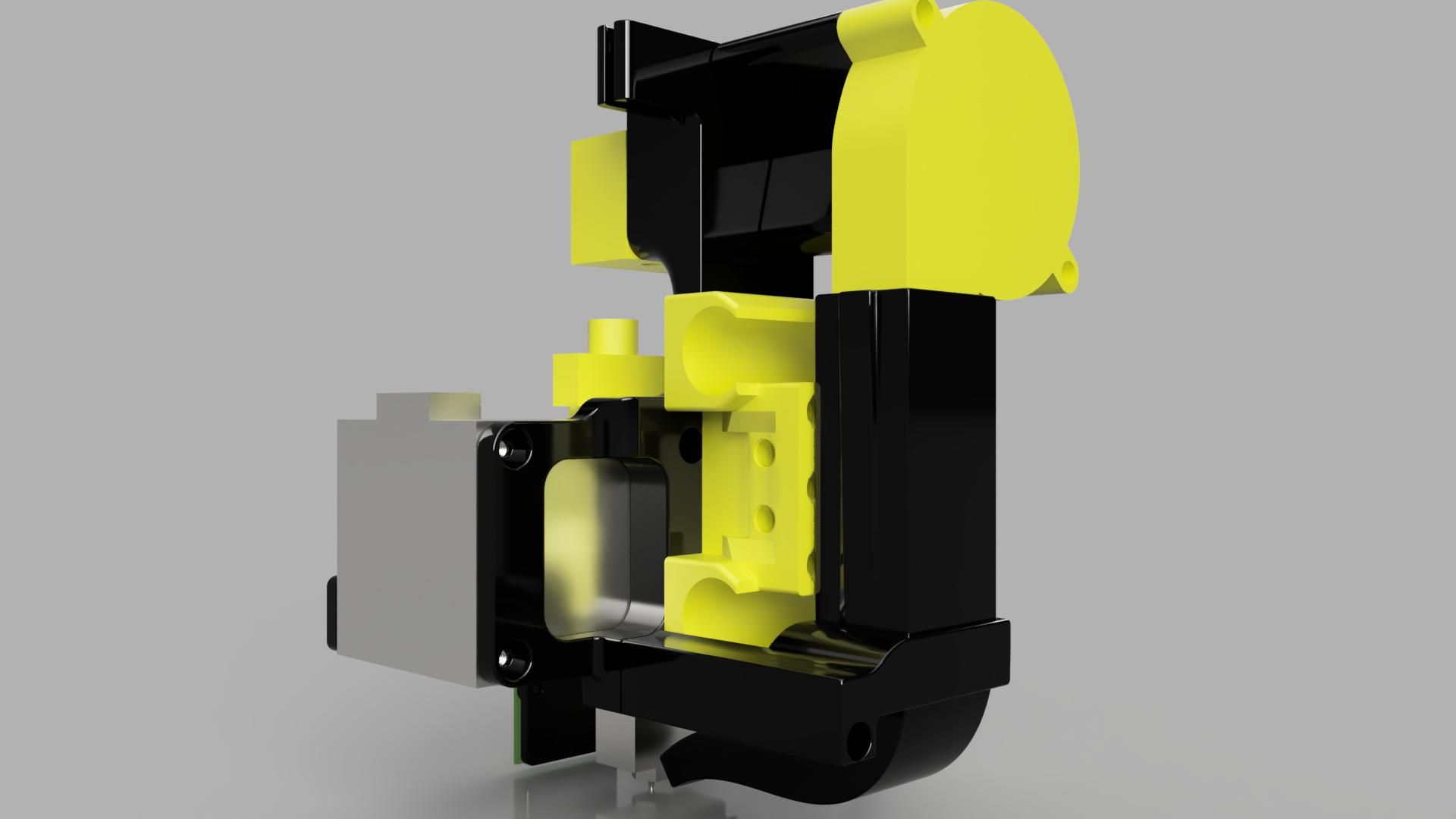
 Any suggestion how I should change this setup for a direct extruder? I am going to heat up the chamber and have the filament inside the case.
Any suggestion how I should change this setup for a direct extruder? I am going to heat up the chamber and have the filament inside the case. The probe won't measure more to the left than this. If I change the probe X-offset from minus to plus, then I can. What is wrong?
The probe won't measure more to the left than this. If I change the probe X-offset from minus to plus, then I can. What is wrong?