Thank you.
What would be great would be an online update function that the board could download the firmware data itself. If that's possible.
(Auto Update Firmware Button on the Webinterface)
With release channels Beta and Stable.
And with update message in the Webinterface when a new Version is available
Also that if you click on Update you will get the realse notes as well.
Best posts made by roth
-
RE: Firmware 2.02 released!posted in Firmware installation
-
RE: 12 V Fan Speed contol at 24 V input voltageposted in Duet Hardware and wiring
@bearer Ok Now I understand it. The problem was that I didn't understand the jumper. What he does.
I just checked it. From factory it ist on the right Position.And I had only read that first and at that time I didn't know that the speed on the duet board would be switched over - the pole. The principle was new for me.
Thank you for your help and patience me.
-
RE: Duet 3 Heated Bed configposted in General Discussion
@Phaedrux said in Duet 3 Heated Bed config:
RRF3
I have to say I think RRF3 and the new Duet 3 are very good.
The connections are better. Clamp larger ones ..
12 V at 24 power supply now possible ...
And PID auto tune.
I can connect different sensors or panel due to IO_3 - IO_7 ..
Everything has become more flexible.A very nice advance to Duet Wifi with RRF2
Latest posts made by roth
-
Duet Magnetic Encoder Delta Printerposted in Third-party add-ons
Hello
I have a Delta printer and am considering buying your Magnetic Encoder.
What do I need ?
How useful is the sensor ?
As I understand it I need three times the Duet 3 Expansion 1HCL board ?
Or will there be another solution to connect three ?Because actually I only need the connection for the magnetic encoder. I do not need the additional options of the expansion board.
Additionally, three expansion boards are much more expensive than the sensors themselves.A Duet 3 Main Board 6HC is already in operation
-
RE: Duet 3 touch screenposted in Duet Hardware and wiring
@bearer I have both a Due 7 panel and an original Raspberry display. Which other displays are best?
Except the one from the Amazon link above?However, I have not yet tested the original Raspberry display.
It should be for something else too. -
RE: Help needed with Duet 3 6hc TMC5160 StealthChop configposted in Tuning and tweaking
@dc42 said in Help needed with Duet 3 6hc TMC5160 StealthChop config:
Both TMC5160 and TMC2209 have stealthChop. It's a little more complicated to configure on the TMC5160 because that chip also has coolStep. Also, stall detection doesn't work in stealthChop mode, so you have to switch to spreadCycle while doing stall detect homing.
TMC2209 is a little different because it doesn't have coolStep and because stall detection only works in stealthChop mode.
In both cases there are some limitations:
- stealthChop doesn't work well at high speeds. That's why there is a changeover speed defined. Above that speed, the driver switches over to spreadCycle. Unfortunately there is a jolt when that happens. The higher the changeover speed, the worse the jolt.
- stealthChop can't react quickly to changes in load. So if your printer is executing a travel move and the nozzle hits a blob or overhang, it is likely to skip steps if the driver is in stealthChop mode.
The TMC2130 drivers used on the Prusa Mk3 with the Einsy board are similar to the TMC5160 drivers but without external mosfets. Prusa defines two printing modes: fast and quiet. My guess is that in quiet mode, they reduce the speed of travel moves so that the drivers can operate in stealthChop mode throughout.
So my suggestion is to use one of the following configurations:
- StealthChop changing over to spreadCycle a very low speed. Compared to running in spreadCycle always, this reduces standstill noise with some motors.
- StealthChop changing over to spreadCycle at a little over your normal maximum printing speed. It will switch to spreadCycle for travel moves, except very short ones. This will only be viable if the jerk at switchover is tolerable.
- Limit your travel speed so that you can keep the printer in stealthChop mode always.
This could also be programmed for the Duet 3 board. The two Printing Modes like Prusa.
The two speed mode.This is very interesting.
What exactly is the speed limit for StealthChop?You can tell us the exact Speed values ?
Or it is probably different for each stepper Motor ?I have 0.9 stepper drivers on a Delta printer.
StealthChop will certainly not be able to do this. At the high speeds. -
RE: config.json update not works + configtool Nozzle Temp Limitposted in Firmware installation
@Phaedrux said in config.json update not works + configtool Nozzle Temp Limit:
temp limits
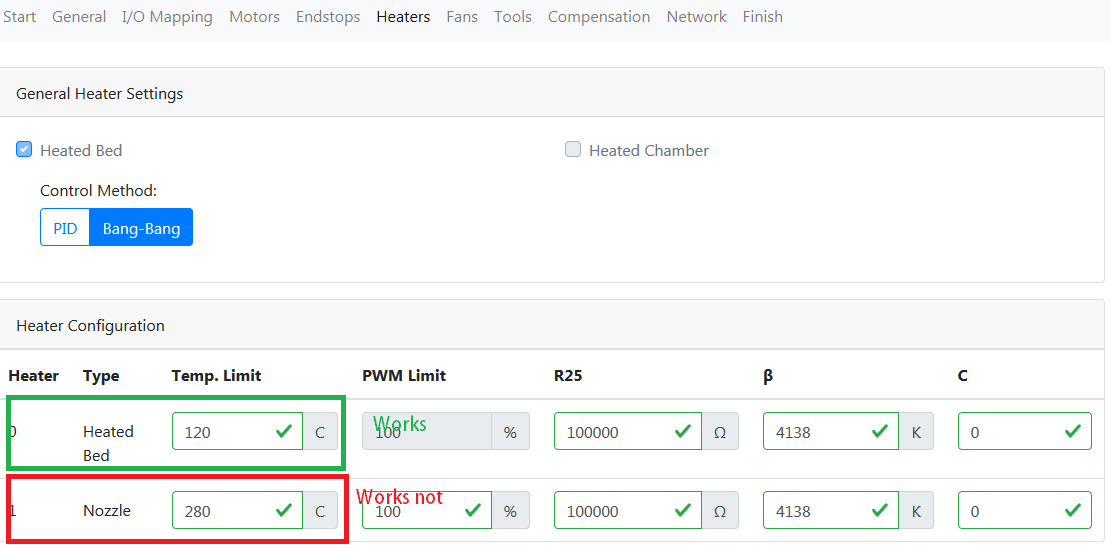
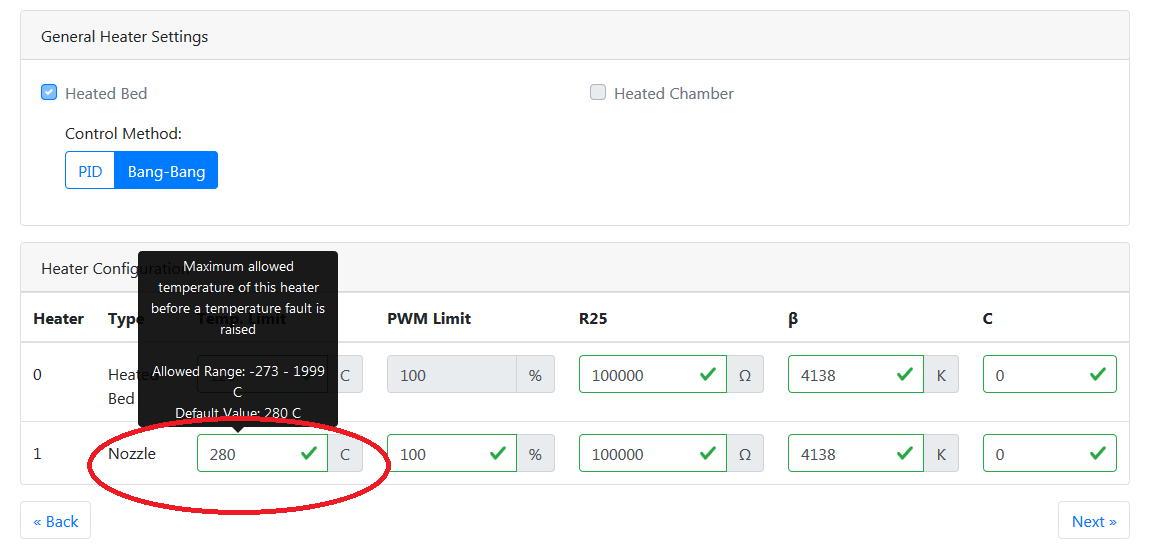
On the configtool you can set the max temp for the Nozzle.
And that not works.
The command for this is missing in the configuration config file.
But only if you select as Board Duet 3It seems to be a bug in the configtool.
-
config.json update not works + configtool Nozzle Temp Limitposted in Firmware installation
Hello
I have made changes to the config file but they are not updated automatically in the config.json file.
This means that the file can no longer be used because the two files no longer match.I also have the problem when I use the configtool to set a Nozzle Temp. Limit it not works.
The file from https://configtool.reprapfirmware.org/Heaters then does not contain the entered temperature limit.
That for the Heat Bed works.
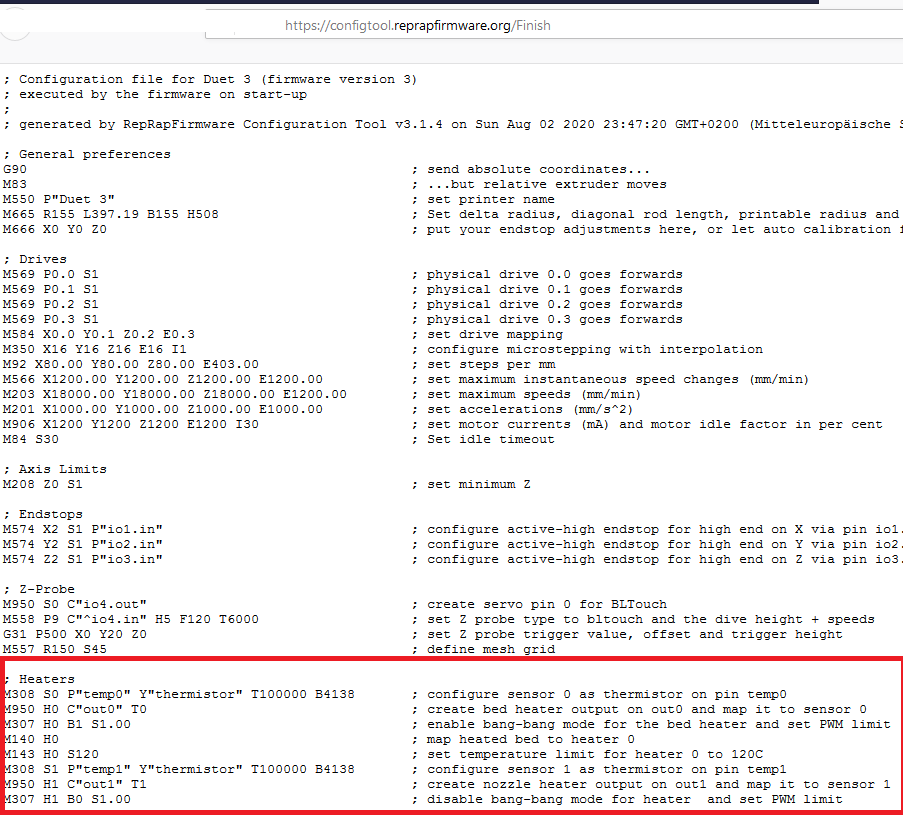
I testet it with a other WebBrowser with a template. And cange it to Duet 3.
Then is not a Limit for the Nozzle in the config file.
When i not cange to Duet 3 it works. -
Duet 3 2 wire Fanposted in Duet Hardware and wiring
Hello
i want to install a 2 wire Fan.
But i have the Problem the Fan is always on.I connect it to GND and V_OUTLC1
M950 F0 C"out4" Q500 ; create fan 0 on pin out4 and set its frequency M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off M950 F1 C"out5" Q500 ; create fan 1 on pin out5 and set its frequency M106 P1 S0 H-1 ; set fan 1 value. Thermostatic control is turned off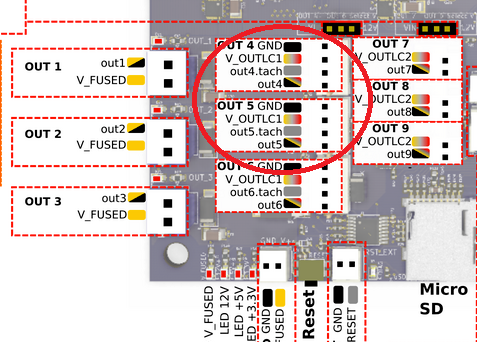
-
RE: G29 Warning: Skipping grid pointposted in Firmware installation
120 mm works.
But why the other size not work ? I have a size of D340 mm