@fcwilt
it is up and running ")
Posts made by tkdirp
-
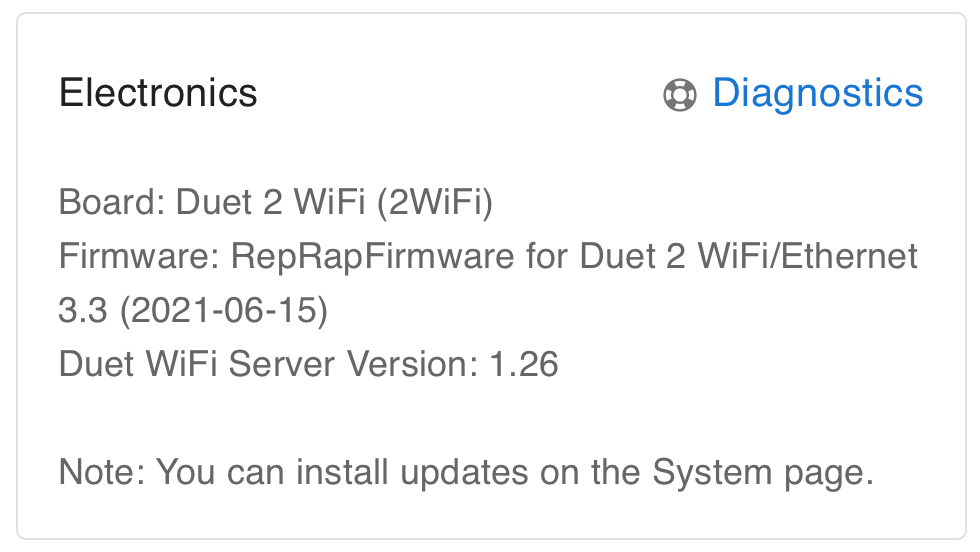
How long dos it take to update to RRF 3.3 form 3.0?posted in Firmware installation
Because it is updating for about 45 minutes.
I want to make sure if it actually updating, an error, or if I am not supposed to do directly to 3.3 from 3.0

-
Your Duet rejected the HTTP requestposted in Using Duet Controllers

So, which file should I be chacking?
-
RE: G28 Error: Failed to enable endstops Sensorless Homing Homingposted in Using Duet Controllers
@phaedrux said in G28 Error: Failed to enable endstops Sensorless Homing Homing:
; Configuration file for Duet WiFi (firmware version 3)
; executed by the firmware on start-up; General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"Penteract" ; set printer name
M669 K1 ; select CoreXY mode; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet; Drives
M569 P0 S1 ; physical drive 0 goes forwards
M569 P1 S1 ; physical drive 1 goes forwards
M569 P2 S1 ; physical drive 2 goes forwards
M569 P4 S0 ; physical drive 3 goes backwards
M584 X0 Y1 Z2 E4 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z1600.00 E690.00 ; set steps per mm
M566 X900.00 Y900.00 Z12.00 E300.00 ; set maximum instantaneous speed changes (mm/min)
M203 X18000.00 Y18000.00 Z180.00 E3600.00 ; set maximum speeds (mm/min)
M201 X2500.00 Y2500.00 Z20.00 E600.00 ; set accelerations (mm/s^2)
M906 X1500 Y1500 Z400 E750 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X-8 Y-8 Z0 S1 ; set axis minima
M208 X300 Y300 Z300 S0 ; set axis maxima; Endstops
M574 X S3 P"xstop" ; configure sensorless homing for low end on X
M574 Y S3 P"ystop" ; configure sensorless homing for low end on Y
M915 X Y R0 F0 ; configure stall detection
M574 Z1 S2 ; configure Z-probe endstop for low end on Z; Z-Probe
M950 S0 C"exp.heater3" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F300 T18000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X16.5 Y-20.2 Z1.89 ; set Z probe trigger value, offset and trigger height
M557 X50:250 Y50:250 S50 ; define mesh grid; Heaters
M308 S0 P"bedtemp" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 0 as thermistor on pin bedtemp
M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit
M307 H0 A422.1 C597.7 D5.1 V24.2 B0 ; tune of heater 0
M140 H0 ; map heated bed to heater 0
M143 H0 S120 ; set temperature limit for heater 0 to 120C
M308 S1 P"e0temp" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as thermistor on pin e0temp
M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit; Fans
M950 F0 C"fan0" Q500 ; create fan 0 on pin fan0 and set its frequency
M106 P0 S0 H-1 ; set fan 0 value. Thermostatic control is turned off; Tools
M563 P0 D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C
M572 D0 S0.04 ; set tool 0 pressure advance; Custom settings are not defined
; homeall.g
; called to home all axes
;
M400
M913 X70 Y70 ; drop motor current to 70%
M400 G91; relative positioning
G1 H2 Z5 F18000 ; lift Z relative to current position
G1 H1 X-305 Y-305 F6000 ; move quickly to X or Y endstop and stop there (first pass)
G1 H1 X-305 ; home X axis
G1 H1 Y-305 ; home Y axis
G1 X5 Y5 F18000 ; go back a few mm
G1 H1 X-305 F1200 ; move slowly to X axis endstop once more (second pass)
G1 H1 Y-305 ; then move slowly to Y axis endstop
G90 ; absolute positioning
M400
M913 X100 Y100 ; return current to 100%
M400
G1 X133.5 Y170.2 F18000 ; go to first bed probe point and home Z
G30 ; home Z by probing the bed
; Uncomment the following lines to lift Z after probing
;G91 ; relative positioning
;G1 Z5 F300 ; lift Z relative to current position
;G90 ; absolute positioning -
G28 Error: Failed to enable endstops Sensorless Homing Homingposted in Using Duet Controllers
I am trying to make Sensorless Homing work on a core-XY machine but whatever I did so far spits out "G28 Error: Failed to enable endstops"
; Endstops
M574 X S3 ; configure sensorless homing for low end on X
M574 Y S3 ; configure sensorless homing for low end on Y
M915 X Y R0 F0 ; configure stall detection
M915 X Y S5 R2
M574 Z1 S2 ; configure Z-probe endstop for low end on Z; Z-Probe
M950 S0 C"exp.heater3" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F300 T18000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X16.5 Y-20.2 Z1.89 ; set Z probe trigger value, offset and trigger height
M557 X50:250 Y50:250 S50 ; define mesh grid -
RE: Error: M587: string too longposted in Firmware installation
@droftarts
is it a wifi problem or the Duet problem? -
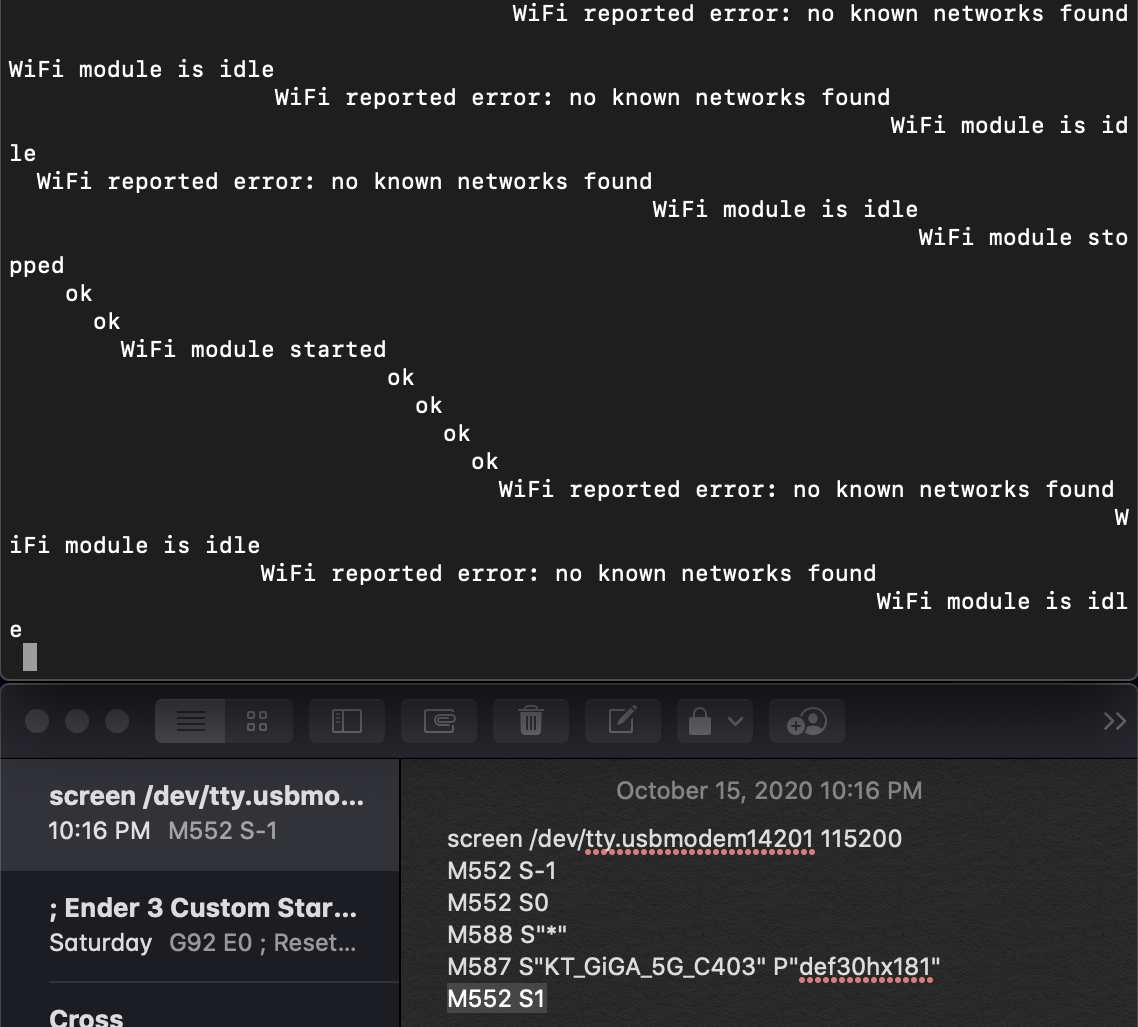
Error: M587: string too longposted in Firmware installation
ls /dev/tty.*
screen /dev/tty.usbmodem14201 115200
M552 S-1
M552 S0
M588 S"*"
M587 S"KT_GiGA_5G_C403” P”def30hx181”
M552 S1 -
Error: Heater 0 fault: 1.6°C/sec is too slow for a heated bed?posted in Duet Hardware and wiring
Apparently, 1.6°C/sec is too slow for a heated bed...

; Heaters
M308 S0 P"bedtemp" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 0 as thermistor on pin bedtemp
M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
M307 H0 B0 S1.00 ; disable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S90 ; set temperature limit for heater 0 to 90C
M308 S1 P"e0temp" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as thermistor on pin e0temp
M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit -
RE: G28 end-stop error after update RRF 2.03 -> 3.1.1posted in Firmware installation
I am currently using a Duet 2 Wifi
-
RE: G28 end-stop error after update RRF 2.03 -> 3.1.1posted in Firmware installation
could this be a problem?

-
RE: G28 end-stop error after update RRF 2.03 -> 3.1.1posted in Firmware installation
; Configuration file for Duet WiFi (firmware version 3)
; executed by the firmware on start-up
;
; generated by RepRapFirmware Configuration Tool v3.1.4 on Wed Jul 15 2020 17:18:11 GMT+0900 (KST); General preferences
G90 ; send absolute coordinates...
M83 ; ...but relative extruder moves
M550 P"printer" ; set printer name
M669 K1 ; select CoreXY mode; Network
M552 S1 ; enable network
M586 P0 S1 ; enable HTTP
M586 P1 S0 ; disable FTP
M586 P2 S0 ; disable Telnet; Drives
M569 P0 S0 ; physical drive 0 goes backwards
M569 P1 S0 ; physical drive 1 goes backwards
M569 P2 S1 ; physical drive 2 goes forwards
M569 P3 S1 ; physical drive 3 goes forwards
M584 X0 Y1 Z2 E3 ; set drive mapping
M350 X16 Y16 Z16 E16 I1 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z1600.00 E420.00 ; set steps per mm
M566 X3000.00 Y3000.00 Z12.00 E120.00 ; set maximum instantaneous speed changes (mm/min)
M203 X29400.00 Y29400.00 Z300.00 E1200.00 ; set maximum speeds (mm/min)
M201 X2500.00 Y2500.00 Z20.00 E250.00 ; set accelerations (mm/s^2)
M906 X1800 Y1800 Z400 E1100 I30 ; set motor currents (mA) and motor idle factor in per cent
M84 S30 ; Set idle timeout; Axis Limits
M208 X-10 Y-10 Z0 S1 ; set axis minima
M208 X290 Y290 Z300 S0 ; set axis maxima; Endstops
M574 X1 S1 P"xstop" ; configure active-high endstop for low end on X via pin xstop
M574 Y1 S1 P"ystop" ; configure active-high endstop for low end on Y via pin ystop; Z-Probe
M950 S0 C"exp.heater3" ; create servo pin 0 for BLTouch
M558 P9 C"^zprobe.in" H5 F300 T21000 ; set Z probe type to bltouch and the dive height + speeds
G31 P500 X16.5 Y-20.2 Z1.95 ; set Z probe trigger value, offset and trigger height
M557 X50:250 Y50:250 S50 ; define mesh grid; Heaters
M308 S0 P"bedtemp" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 0 as thermistor on pin bedtemp
M950 H0 C"bedheat" T0 ; create bed heater output on bedheat and map it to sensor 0
M307 H0 B1 S1.00 ; enable bang-bang mode for the bed heater and set PWM limit
M140 H0 ; map heated bed to heater 0
M143 H0 S90 ; set temperature limit for heater 0 to 90C
M308 S1 P"e0temp" Y"thermistor" T100000 B4725 C7.06e-8 ; configure sensor 1 as thermistor on pin e0temp
M950 H1 C"e0heat" T1 ; create nozzle heater output on e0heat and map it to sensor 1
M307 H1 B0 S1.00 ; disable bang-bang mode for heater and set PWM limit; Fans
; Tools
M563 P0 S"V6_Gold" D0 H1 F0 ; define tool 0
G10 P0 X0 Y0 Z0 ; set tool 0 axis offsets
G10 P0 R0 S0 ; set initial tool 0 active and standby temperatures to 0C; Custom settings are not defined
-
G28 end-stop error after update RRF 2.03 -> 3.1.1posted in Firmware installation
G28 end-stop error happens after updated RRF 2.03 -> 3.1.1


-
Duet Web Control use outsideposted in Duet Web Control
Is it possible to access Duet Web Control without being connected to the dedicated wifi network and not using a Raspberry Pi?
-
RE: Homing Errorposted in General Discussion
@Phaedrux
The motor wires were connected incorrectly and I just disable the fan function in the RepRap firmware because I did not order the corresponding wires yet. Anyways, the homing of the x and y-axis works well now.
Thank you.