Missing Steps - Cant Print SpreadCycle StealthChop tuning help
-
@argo thanks for the extra detail. Did you test the motors on your machine, or on their own? It does seem some 0.9 motors are fine; the E3d motors are mentioned by some in that thread as being okay.
Ian
Bed-slinger - Mini5+ WiFi/1LC | RRP Fisher v1 - D2 WiFi | Polargraph - D2 WiFi | TronXY X5S - 6HC/Roto | CNC router - 6HC | Tractus3D T1250 - D2 Eth
-
I tested them only on my i3 style bed slingers.
There are small differences between motors. The StepperOnline motor for example is a bit quieter.If you are referring to the 0.9 Moons posting in the GitHub Marlin issue. I think I read somewhere deeper that he isn't using TMC2209s. I was almost pushing the buttons to buy Moons for further testing.
-
@droftarts As a further data point I use E3D 0.9 steppers with both TM2209 and TMC5160 drivers on a coreXY setup. In both cases I'd say that although they work for me, they are certainly much noisier than the 1.8 motors they replaced and it was also much harder to get sensorless homing configured with them, the range of settings in which the motor would actually move but would also stall when needed seemed to be much smaller.
I operate the drives in Stealthchop all of the time at relatively modest speeds. Print speed max 60mm/S non print moves max 200mm/S. I'm running lower steps/mm than those quoted here mine are 180steps/mm.
All of the above testing was using the RRF STM32F4 port on a Bigtreetech SKR Pro.
-
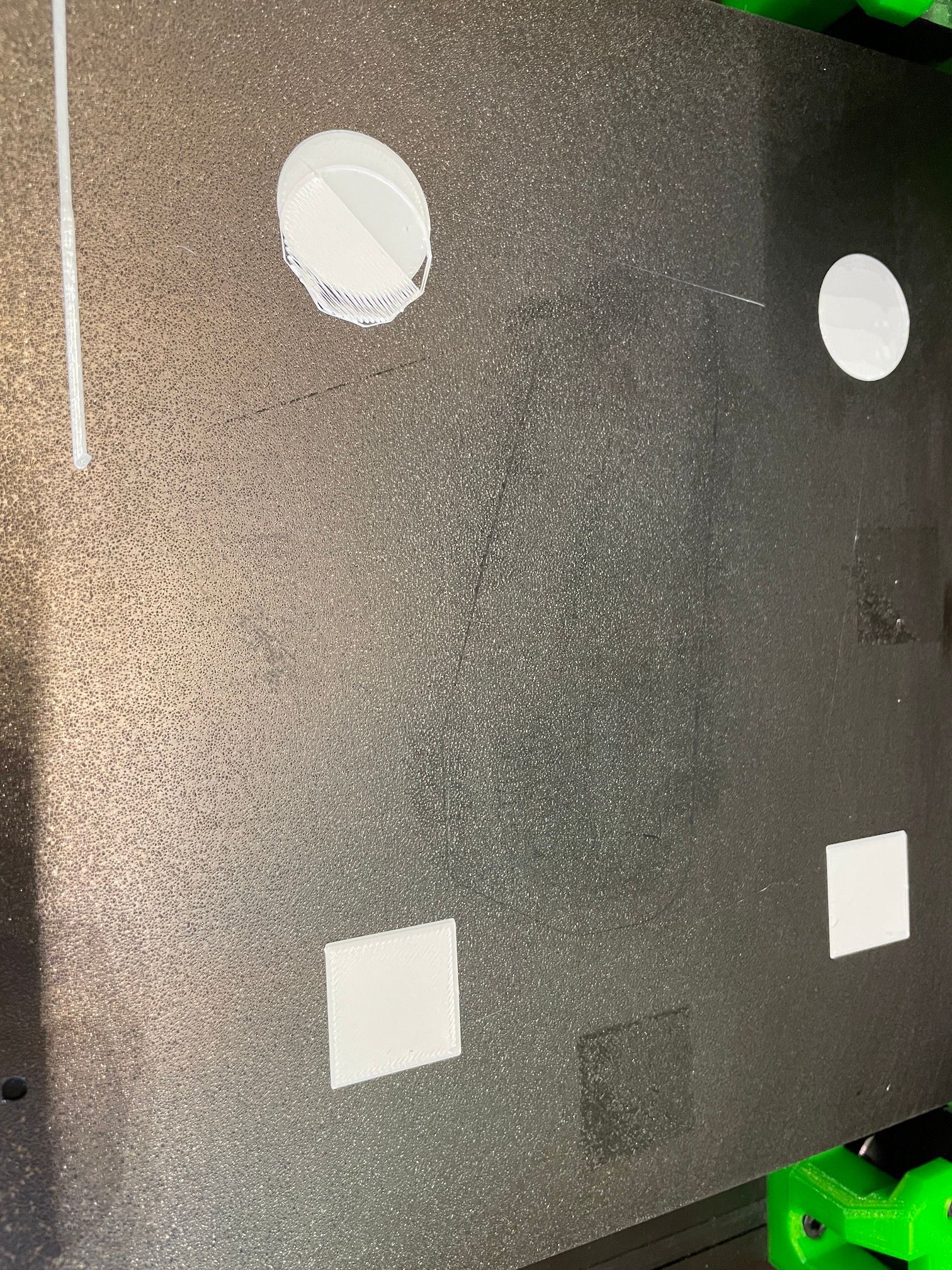
So this morning ive disabled input shaper as that was coined as a possible cause but it didn't make any noticeable difference. I then disabled mesh bed levelling which has made the bump worse and more frequent. Ill pull each motor and see which or both is having the issue.
The minor bumps / bangs were still present on infill but the bigger thump was on the travel move from the front square to the disc, with mesh bed levelling active travel moves were ok since forcing SpreadCycle.
-
@carcamerarig Can you post a gcode file that demonstrates the problem? The one used in your previous post will be fine.
Ian
-
@gloomyandy thanks that's helpful. could you point to any specific differences in what you observed between the 5160 and the 2209?
-
@t3p3tony Both the 5160 and 2209 were a pain to tune with the 0.9 steppers. I started out with 2209s and managed to get them working pretty well. I basically use the following sequence during and home move:
M913 X50 Y50 Z50
M915 p0 s25 H125 r0
M915 p1 s25 H125 r0
G1 H1 X-310 F2000
With the same settings and the 5160 the motors would not stall. But if I lowered the S parameter then they seemed to stall pretty much straight away. After a lot of messing around I ended up with the following:
M913 X35 Y35 Z50
M915 p0 s1 H500 f0 r0
M915 p1 s1 H500 f0 r0
G1 H1 X-310 F3000
Basically I had to use a more sensitive X setting and to prevent them from stalling too early I needed to increase the speed threshold. I also found that increasing the homing speed helped make things more consistent.But I must say that this was not a very scientific process. I suspect that other combinations may well work (perhaps with better results). I was just happy to find a combination of settings that worked reliably!
In both cases the motors are pretty noisy (even using stealthchop) compared to using 1.8 degree steppers, especially at higher speeds. As you might expect with a coreXY pure X or Y moves seem louder (as both motors are active).
-
@gloomyandy posted
[[ Both the 5160 and 2209 were a pain to tune with the 0.9 steppers. I started out with 2209s and managed to get them working pretty well. ]]
But this is in Stealthchop mode ONLY 100% of the time ... utilizing print speeds < 100 mm/s and non print travel moves < 200 mm/s right ? Probably fine for MOST cartesians but not the OPS - travel moves over 200 mm/s are doable as are much faster print moves.
Operating in stealthchop for several of us is just not a solution - especially on a Voron 2.4 - purpose built to far exceed Stealthchop limitations.
The issue we're fighting isnt Homing sensitivity and the PITA that that is- we've gotten past that - we're now missing steps during print moves < 100 mm/s in Spreadcycle. Thats a very serious issue for a 3d print and the FW - somewhere. This post is far beyond mere inconvenience, its now to the point of the Duet 3 Mini 5+ viability as a useable board.
-
@sputnikoc3d I was simply providing some extra data points about the e3d motors and responding to Tony's question. The original poster described the problems he was having as "Im only talking 180mm/s on no print moves and 60-100 on print moves." both of which are in the same region as my setup.
So do you have this same physical machine configuration, motors, rails, belts etc. working at these speeds with any other control board and firmware, particularly with the same drivers? If so perhaps it would be helpful to post the details.
-
@gloomyandy ... Yes - we do have some test cases setup.
I have 2 Duet2 wifi's running various LDO .9* and 1.8* steppers
I have a voron 2.4 build in the works that will possibly be fitted with a Mini 5_ Duet 3 w/ Pi4We also have a test Caribou 320 with Mini 5+ - w/ LDO .9* steppers on X / Y / E [ OP's machine ]
Another Bear with linear rails w/ Mini 5+ - w/ LIN .9* steppers on X Y E - working ins spreadcycle but skipping steps and klunking on higher than 180 mm/s moves
Then a Voron 2.4 w/ full sized main board duet and .9* OMC Stepper online on all axis
Then another Voron 2.4 with SKR and 2209's and 1.8* LDO Motors
So lots of things being compared ... This with this exhibits that or none of this etc ..
Thru the process of elimination its seems to be either LDO .9* motors or RRF3 FW.
-
@t3p3tony - any potential ideas to help get this resolved. If not - pretty sure I'll just send my Mini 5+ back in for a refund to Filastruder.
Someone needs to put some type of effort also into getting Trinamic engaged to help sort these issues its across the spectrum with several other boards - at least with those one can swap out drivers.
Never thought Id be sending back a Duet in order to get a china board ... for different drivers.
-
For the time being I’ve pulled the LDO .9’s and replaced with LDO 1.8’s. The thumping / missed steps was across all travel and print moves, in stealthchop switching and forced spreadcycle, fast or slow .45mm/s to 180mm/s. I believe Ian is on the case, someone spoke to LDO and Caribou have an evaluation board that will make some tests on .9’s.
It would be nice considering the staggering amount of time people have graciously put into this if the right people could keep the thread updated please.Thanks J
-
Nothing new to report at the moment but yes, we are on the case.
-
I'm getting hold of Wantai, LDO (thanks @carcamerarig) and E3D 0.9° motors to test. I have a range of Duet boards to test on, and a stepper motor analyser coming. Unfortunately it's not going to be a quick fix; I'll probably need to write a report to send to Trinamic and/or LDO with my findings.
If people can post their sys folder and a file that causes them issues, preferably together in a zip file (you can upload zip files to the forum, so long as you put .txt on the end, or host them elsewhere and post a link), and comment what board and motors they have, that may make this task a little quicker.
If anyone has any observations, or spots other conversations about this issue, even on other firmwares, please post and I'll follow it up.
Ian
-
Little update...
Im still having the banging / thumping issues with 1.8 motors causing layer shifts.
Y runs from left to right in this imageSat with it for 1.5hrs listening and watching, there are still what im calling micro bumps where for instance on the infill pattern both X and Y are very jerky and its this causing the micro thumps but on a few travel moves there is a distinct bang and this mid move stop for a few ms's then the moves continues. This is the layer shift point, nice and sane print / travel speeds as faster print moves are worse.
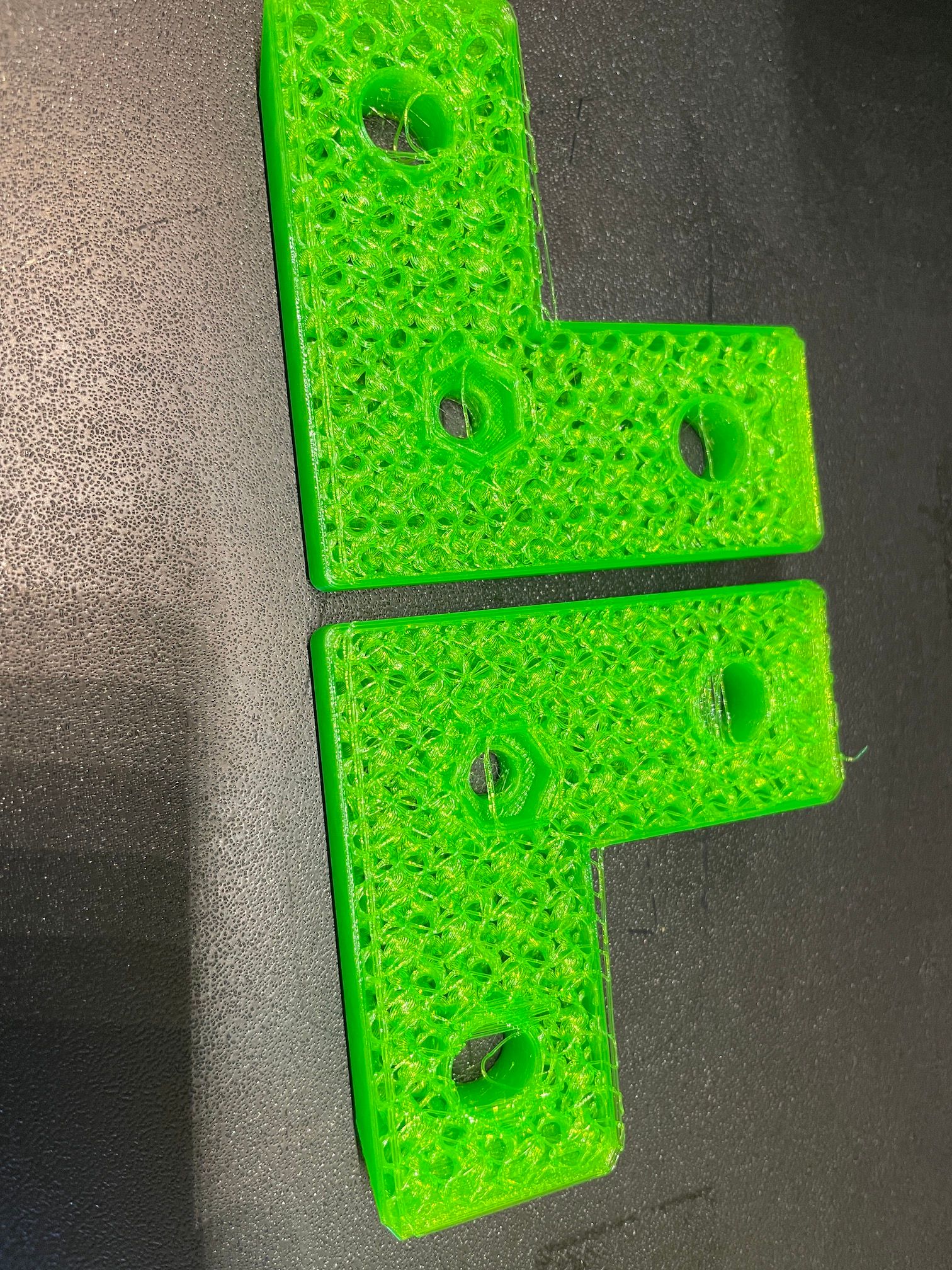
in between the .9's and 1.8 motors, I noticed the Y motor holder had a crack in it, I believe caused by these bangs ( I was actually hopeful that it was a mechanical fault causing the whole issue but sadly still persists after fitting the replacement holder) And if im honest the infill movements do seem like the bearing blocks have square bearings inside but after numerous times of disconnecting the belts to check the carriages run butter smooth ( I have also repacked them for clarity).
So this isn't unique to the .9's in my case both in hybrid mode or forced spreadcycle, any suggestions on things to try / test? Run in standalone mode? 3.2 fw? This latest config is running in M569 V0 mode. Is it possible I have a faulty board?
Config
; General preferences Duplicate lines and comment out unused G90 ; Send absolute coordinates... M83 ; ...but relative extruder moves M564 H0 ; Permits ALL Axis movement prior to or without ANY Homing require [ over-rides default of no movement until all homed ] ; Network Networked of sbc ;M550 P"Duet3" ; Set machine name ;M552 S1 ; Enable network ;*** Access point is configured manually via M587 ;M586 P0 S1 ; Enable HTTP ;M586 P1 S0 ; Disable FTP ;M586 P2 S0 ; Disable Telnet M575 P1 S1 B57600 ; Panel Due ; Drive Mappings M569 P0.0 S0 V0 ; Drive 0 goes forwards: X Axis M569 P0.1 S0 V0 ; Drive 1 goes backwards: Y Axis M569 P0.2 S0 V0 ; Drive 2 goes backwards: Z Axis M569 P0.3 S0 V0 ; Drive 3 goes forwards: E Axis M569 P0.4 S0 V0 ; Drive 4 goes backwards: Z Axis (at E1) ; Motor remapping for dual Z and axis Limits M584 X0 Y1 Z2:4 E3 ; two Z motors connected to driver outputs Z and E1 M671 X-37:287 Y0:0 S4 ; leadscrews at left (connected to Z) and right (connected to E1) of X axis ; Micrpstepping and Speed M350 X32 Y32 E16 Z16 I1 ; Configure microstepping with interpolation M92 X200.00 Y200.00 Z400.00 E830.00 ; Set steps per mm ; Speeds, Acceleration and Jerk M566 X240 Y240 Z24 E1200 P1 ; Set maximum instantaneous speed changes (mm/min) aka Jerk M203 X9000 Y9000 Z720 E4000 ; Set maximum speeds (mm/min) M201 X2000 Y2000 Z200 E4000 ; Set accelerations (mm/s^2) M204 P1250 T1700 ; set print and travel accelerations (mm(s^2) ; Motor currents M906 X800 Y850 Z600 E792 I30 ; Set motor currents (mA) and motor idle factor in percent M84 S30 ; Set idle timeout ; Printer geometry M208 X0:250 Y-4:215 Z-0.5:415 ; X carriage moves from 0 to 250, Y bed goes from 0 to 210 M564 H0 ; allow unhomed movement ; Endstops for each Axis M574 X1 S3 ; Set endstops controlled by motor load detection M574 Y1 S3 ; Set endstops controlled by motor load detection ; Stallgaurd Sensitivy M915 X S-5 F0 H200 R0 ; Set X axis Sensitivity M915 Y S-1 F0 H200 R0 ; Set y axis Sensitivity ; Input Shaper ;M593 F61.85 ; Input Shaping ; Z-Probe Super Pinda M574 X1 S3 ; configure sensorless endstop for low end on X M574 Y1 S3 ; configure sensorless endstop for low end on Y M574 Z1 S2 ; Set endstops controlled by probe M558 P5 C"^io3.in" I1 H1 F500 T4800 A30 S0.004 ; Super Pinda ; Probing Mesh Grid and Sheets M557 X24:221 Y10:195 P8 ; Define mesh grid for probing G31 P1000 X23 Y5 Z1.91 ; Textured Sheet ;G31 P1000 X23 Y5 Z1.280 ; PEI ; Heatbed Heaters and Thermistor Bed M308 S0 P"temp0" Y"thermistor" T100000 B4725 C7.060000e-8 ; Set thermistor + ADC parameters for heater 0 Bed M950 H0 C"out0" T0 Q10 ; Creates Bed Heater M307 H0 R0.273 C345.3 D10.89 S1.00 V23.8 ; Bed PID new version !!saved In config-override!! M140 H0 ; Bed uses Heater 0 M143 H0 S120 ; Set temperature limit for heater 0 to 120C Bed ; HotEnd Heaters and Thermistor HotEnd M308 S1 P"temp1" Y"thermistor" T500000 B4723 C1.19622e-7 ;define E0 temperature sensor Slice HT M950 H1 C"out1" T1 ; Create HotEnd Heater M307 H1 R2.383 C178.5:130.6 D5.32 S1.00 V23.9 ; Hotend PID new version !!saved In config-override!! M143 H1 S285 ; Set temperature limit for heater 1 to 285C HotEnd M302 S185 R185 ; Fans M950 F1 C"out5" Q250 ; Creates HOTEND Fan M106 P1 T45 S235 H1 ; HOTEND Fan Settings M950 F0 C"out6" Q100 ; Creates PARTS COOLING FAN M106 P0 H-1 ; Set fan 1 value, PWM signal inversion and frequency. Thermostatic control is turned off PARTS COOLING FAN ; Tools M563 P0 D0 H1 F0 ; Define tool 0 G10 P0 X0 Y0 Z0 ; Set tool 0 axis offsets G10 P0 R0 S0 ; Set initial tool 0 active and standby temperatures to 0C G91 G1 X1 Y1 Z1 ; calibrate StealthChop values G90 M83 G4 S2 M84 ; disable motors M98 P"0:/macros/02_Functions/StartupFilamentSensorCheck" ; Runout Sensor Logic: Startup with filament = runout sensor active Startup without filament = autoload active ;M92 X200.00 Y200.00 Z400.00 E830.00 ; Set steps per mm -
@carcamerarig said in Missing Steps - Cant Print SpreadCycle StealthChop tuning help:
Run in standalone mode?
Always worth trying.
-
@phaedrux said in Missing Steps - Cant Print SpreadCycle StealthChop tuning help:
@carcamerarig said in Missing Steps - Cant Print SpreadCycle StealthChop tuning help:
Run in standalone mode?
Always worth trying.
Is there a debugging mode that could do a hw / fw dump or whatever you call it?
-
@carcamerarig M122 gives a dump of info on the current state. And there is additional logging you can enable but I'm not sure it will capture anything useful in this case.
https://duet3d.dozuki.com/Wiki/Logging
and
https://duet3d.dozuki.com/Wiki/Getting_Started_With_Duet_3#Section_Monitoring_optional -
Just another data point: I am having a similar problem on a CoreXY setup, Mini5+ and 0.9 motors. The printer worked perfectly with a Duet2 but will randomly (and loudly!) skip steps with a Mini5+.
I have raised the motor amps and lowered jerk a lot (
M566), reduced travel & print speed in the slicer, forced spreadCycle mode all the time on XY but still I get skipping, exactly like @carcamerarig describes (suddenly a loud "thump" and then there is a major layer shift). It is random, sometimes I can finish a small print but usually not.I see this in the
M122dump, could it be related? Write errors, timeouts, failedOps...Driver 0: position 99200, standstill, SG min/max 0/54, read errors 0, write errors 1, ifcnt 59, reads 53605, writes 19, timeouts 184, DMA errors 0, failedOp 0x41 Driver 1: position 0, standstill, SG min/max 0/52, read errors 0, write errors 1, ifcnt 59, reads 53758, writes 19, timeouts 31, DMA errors 0, failedOp 0x72 Driver 2: position 5755, standstill, SG min/max 0/56, read errors 0, write errors 1, ifcnt 58, reads 53596, writes 18, timeouts 194, DMA errors 0, failedOp 0x6f Driver 3: position 0, standstill, SG min/max 0/56, read errors 0, write errors 1, ifcnt 58, reads 53650, writes 19, timeouts 138, DMA errors 0, failedOp 0x6f Driver 4: position 0, standstill, SG min/max 0/62, read errors 0, write errors 1, ifcnt 41, reads 53792, writes 13, timeouts 3, DMA errors 0, failedOp 0x01 Driver 5: position 0, standstill, SG min/max 0/510, read errors 0, write errors 1, ifcnt 55, reads 53598, writes 18, timeouts 192, DMA errors 0, failedOp 0x72 Driver 6: position 0, standstill, SG min/max 0/496, read errors 0, write errors 1, ifcnt 55, reads 53787, writes 18, timeouts 3, DMA errors 0, failedOp 0x41I tried upgrading from 3.2.2 to 3.3b2 and that made no difference, skipping is still random.
VORON V2 CoreXY + Duet3 Mini5+ Ethernet v1.0 with Mini2+ expansion, VORON V0 CoreXY + Duet2 Maestro
-
@fulg - what motors are you running - brand and model # ?
Thank you for posting ...